
 , 杨冬梅
, 杨冬梅 东北大学 理学院,辽宁 沈阳 110819
收稿日期:2021-07-30
作者简介:李惜笑(1997-), 女, 江苏南京人, 东北大学硕士研究生;
杨冬梅(1966-), 女, 辽宁沈阳人, 东北大学教授。
摘要:针对一类含有外部扰动的分数阶广义系统进行滑模控制研究, 提出了一种改进的指数趋近律从理论上消除了抖振.通过构造分数阶反馈控制器的方法将分数阶广义系统正常化.采用积分滑模面以消除滑模运动的趋近阶段.分数阶次α分0 < α < 1和1 < α < 2两种情况讨论, 运用Kronecker积与LMI方法, 分别设计增益矩阵使得滑动模态方程稳定.在滑模控制器的设计中, 对指数趋近律进行了性能的改进, 以所设计的连续函数代替符号函数, 使得当状态趋近滑动模态时可以与滑动模态实现光滑过渡.最后, 通过Simulink建立滑模控制仿真实验, 验证了0 < α < 1和1 < α < 2两种情况下算法的有效性.
关键词:滑模控制指数趋近律分数阶系统广义系统积分滑模面LMI
Design and Simulation of Sliding Mode Controllers for Fractional-Order Singular Systems with Uncertainties
LI Xi-xiao
, YANG Dong-mei School of Sciences, Northeastern University, Shenyang 110819, China
Corresponding author: LI Xi-xiao, E-mail: lxx_19970225@126.com.
Abstract: In this paper, sliding mode control is studied for a class of fractional-order singular systems with external disturbances, and an improved exponential reaching law is proposed to eliminate chattering in theory. The integral sliding surface is used to eliminate the approaching phase of sliding mode movement. Kronecker product and LMI method are used to design the gain matrix in order to stabilize the sliding mode equation in both cases: 0 < α < 1 and 1 < α < 2. In the design of sliding mode controller, the performance of exponential reaching law is improved, and the sign function is replaced by the designed continuous function, so that when the state approaches the sliding mode, the smooth transition can be achieved with the sliding mode. Finally, the simulation experiments of sliding mode control are established by Simulink to verify the effectiveness of the algorithm in both cases: 0 < α < 1 and 1 < α < 2.
Key words: sliding mode controlexponential reaching lawfractional-order systemssingular systemsintegral sliding surfaceLMI
分数阶导数和积分反映的不是局部或某个点的性质,而是综合考虑了过去历史以及非局部分布式的影响,能够更好地描述现实世界,在黏性流体力学和软物质力学的研究方面,分数阶模型发挥了不可替代的作用[1-3].滑模控制是一种非线性控制方法, 具有突出的对外部干扰的不变性, 同时具有响应速度快和易于实现等优点[4].目前对于线性不确定系统的滑模变结构控制已经取得了众多研究成果[5-6], 但是滑模控制系统仅在滑模运动阶段对系统的不确定性和外部扰动具有不变性, 在缩短趋近时间的同时有效削弱或消除抖振是非常必要的.
目前, 国内外对抖振问题的研究已取得显著成果,包括趋近律方法[7]、高阶滑模方法[8-10]及准滑模方法[11]等.高为炳[7]在分析抖振产生原因的基础上, 提出了三种趋近律方法削弱抖振: 等速趋近律趋近速度恒定, 指数趋近律在远离滑模面时趋近速度快, 但等速趋近律与指数趋近律都无法消除抖振, 幂次趋近律能消除抖振, 但是远离滑模面时速度过小, 导致趋近时间过长.文献[12]结合了指数趋近律与幂次趋近律的优点, 提出了一种快速幂次趋近律, 解决了传统幂次趋近律趋近速度慢的问题; 文献[13]在幂次趋近律的基础上, 提出了双幂次趋近律, 有效改进了幂次趋近律的性能, 但对所提出趋近律缺少定性分析; 文献[14]在此基础上, 针对双幂次趋近律进行了定性分析, 并解决了系统受到外部干扰时的抖振问题, 但在双幂次趋近律下, 状态响应只能收敛到稳态误差内, 不能收敛到零; 文献[15]提出了一种改进的不确定性上界自适应律, 以保证采用边界层技术时被控对象状态和控制增益估计的有界性.
目前, 针对不确定分数阶广义系统滑模控制的研究也取得了一定的进展.文献[16]研究了含有外部扰动的分数阶广义系统的滑模控制, 在设计状态反馈控制器将广义系统正常化的基础上进行研究, 设计了线性滑模面以保证系统对外部干扰的不变性, 但是设计的控制器不能有效提高状态的收敛速度; 文献[17]针对含有非匹配不确定性的分数阶系统进行滑模控制, 在滑模面的设计中采用了积分滑模面, 提高了滑模控制的性能, 使用了指数趋近律方法设计滑模控制器, 仿真实验中产生了明显的抖振现象; 文献[18]设计了一种分数阶积分滑模面, 将积分滑模面与观测器相结合, 抑制了混沌现象, 对抖振的削弱是通过调节指数趋近律参数实现的, 为了削弱抖振, 在参数选取上有很大的局限性; 文献[19]提出了一种改进的积分终端滑模控制器, 该控制器具有快速滑动面和连续趋近律, 然后采用状态观测器测量内外部扰动, 但控制输入仍然存在抖振现象.
在以上文献的基础上, 本文针对一类含有外部扰动的分数阶广义系统进行滑模控制研究.本文采用Caputo分数阶导数定义[20], 构造了分数阶反馈控制器将分数阶广义系统正常化; 采用积分滑模面使得系统于初始时刻就位于滑模面上, 改善了滑模运动的品质; 在滑模控制器设计中, 对分数阶次α分0 < α < 1与1 < α < 2两种情况, 分别设计增益矩阵使得滑动模态方程稳定, 并对指数趋近律进行了性能的改进; 仿真实验结果表明, 改进的指数趋近律较指数趋近律, 具有更好的运动品质.
1 不确定分数阶广义系统考虑不确定分数阶广义系统
 | (1) |
对系统作如下假设.
假设1??(E, A, B)强能控, rank(E B)=n, B列满秩;
假设2??存在λ∈C, 使得det(λE-A)≠0;
假设3??n-m≤m, n-m≤rank(E);
假设4??外部扰动η(t)是范数有界的, 即存在常数d>0, 使得‖η(t)‖2 < d.
2 广义系统的正常化引理1[21]??存在非奇异矩阵M和N, 使得
 |
 | (2) |
 | (3) |
 | (4) |
 | (5) |
由分数阶微分的性质, 有
 |
 | (6) |
 | (7) |

 | (8) |
 | (9) |
考虑分数阶系统
 | (10) |
 | (11) |
根据引理2, 当1 < α < 2时, 分数阶系统(10)的稳定域是凸区域, 而当0 < α < 1时, 分数阶系统(10)的稳定域是非凸区域, 所以对分数阶α分0 < α < 1与1 < α < 2两种情况进行讨论.
3.1 0 < α < 1情况引理3[23]??当0 < α < 1时, 分数阶系统(10)稳定的充要条件是存在2个合适维数的矩阵X与Y, 使得下面2个线性矩阵不等式成立:
 | (12) |
 | (13) |

推论1[23]??分数阶系统(10)是渐近稳定的, 当且仅当存在合适维数的矩阵P,使得下面2个线性矩阵不等式成立:
 | (14) |
 | (15) |
 | (16) |
 | (17) |
 | (18) |
 | (19) |
3.2 1 < α < 2情况引理4[24]??当1 < α < 2时, 分数阶系统(10)稳定的充要条件是存在一个对称正定矩阵P, 使得线性矩阵不等式
 | (20) |
定理2??当1 < α < 2时, 如果存在对称正定矩阵P∈Rn×n与矩阵S∈Rm×n, 使得线性矩阵不等式
 | (21) |
 |
 | (22) |
 | (23) |
 |
 |
 |
3.3 分数阶系统的滑模控制器设计指数趋近律为
 | (24) |
 | (25) |
 | (26) |
 | (27) |
 | (28) |
式(28)说明, 无论k1取何值, 当状态无限逼近却没有到达滑模面时, 各状态分量的速度绝对值均为k1, 由于系统运动速度具有连续性, 状态到达滑模面的瞬间, 速度不可能立刻从k1减小到0, 这将导致状态过冲, 即各状态到达滑模面时仍存在非零速度, 在该速度的作用下, 状态会再次脱离滑模面, 而在脱离滑模面后, 又会在符号函数的作用下, 反方向以速度k1再次向趋近滑模面方向运动, 并不断重复该过程, 从而产生抖振, 抖动的频率与幅度都和k1正相关.抖振的存在严重影响着滑模运动的品质, 如果不能消除抖振或将抖振削弱到允许的范围内, 滑模控制是不能运用到实际应用中的[7].
改进的指数趋近律为
 | (29) |
 | (30) |
注1??无论改进指数趋近律(29)中k1与k2取何值, 只要满足k1>0, k2>0, 就可以有效消除抖振, 而传统指数趋近律(24), 为了削弱抖振只能选取较小的k1, 一般k1取值不超过1, 且即便选取较小的k1(例如0.1), 抖振现象仍然存在.
注2??改进指数趋近律(29)分母中ε可以是任意小的正数, 在选取参数时, 拥有很大的自由度, 可以通过调节参数使系统拥有更好的性能与品质.
注3??改进指数趋近律的设计中, 可以将符号函数用下列连续函数近似, 有效消除抖振影响:


当0 < α < 2时, 设计滑模控制器
 | (31) |
 | (32) |
 | (33) |
 | (34) |
定理3??对于不确定分数阶系统(4), 选取滑模面(5), 则滑模控制器(31)使系统在初始时刻t0就位于滑模面上, 且满足滑模运动的到达条件.
证明??将系统(4)代入式(6)得到式(7), 取李雅普诺夫函数
 |

在滑模面(5)中, 显然有s(t0)=0, 这表明在初始时刻, 分数阶系统(4)的状态就位于滑模面上, 消除了滑模运动的趋近阶段, 由

注4??滑模面的到达条件始终成立表明, 在任何时刻t, 即使因为外界干扰、运动惯性、趋近律过冲等原因, 系统状态离开了滑模面, 也具备重新回到滑模面的能力.当状态离开滑模面时, 若s(t)>0, 则改进的指数趋近律(29)可以保证

4 数值仿真利用MATLAB中的Simulink模块对正常化后的分数阶系统进行仿真, 为了获得更准确的仿真效果, 统一使用了固定步长方法, 设置固定步长为0.001s.仿真中关于分数阶微积分的相关计算, 使用了FOTF工具箱[25-26].
考虑分数阶广义系统(1), 其中,
 |
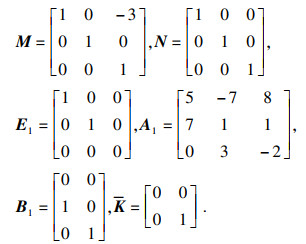 |

4.1 0 < α < 1情况考虑分数阶α=0.8时的情形, 初始状态取x0=x(t0)=x(0)=[1-1 1]T.
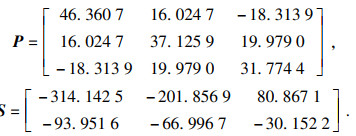
根据定理1,利用MATLAB中的LMI工具箱,求解不等式(16)和(17), 解得
 |
 |
注5??选取k1=15是为了验证, 改进的指数趋近律不必为了削弱抖振而选取较小的k1, 即使k1取较大的值, 也不会产生抖振现象.
基于指数趋近律与改进指数趋近律得到的状态响应曲线图分别见图 1a与图 1b.可以看出, 图 1b中状态响应收敛速度较快, 在0.5s之后, 状态响应就基本收敛到零了, 图 1a中状态响应产生了抖振现象, 为了验证改进后的指数趋近律不会产生抖振现象, 对图 1b进行局部放大得到图 1c, 可以看出, 改进后的指数趋近律完全消除了抖振影响.
图 1(Fig. 1)
 | 图 1 α=0.8时状态响应对比图Fig.1 State responses comparison(α=0.8) (a)—传统指数趋近律;(b)—改进指数趋近律;(c)—图1b的局部放大图. |
基于指数趋近律与改进指数趋近律得到的控制输入响应曲线图分别见图 2a与图 2b, 对图 2b进行局部放大得到图 2c.可以看出, 指数趋近律下的控制输入产生了抖振现象, 且抖振幅度较大, 而在改进的指数趋近律下, 控制输入的抖振被消除了.
图 2(Fig. 2)
 | 图 2 α=0.8时控制输入响应对比图Fig.2 Control inputs comparison(α=0.8) (a)—传统指数趋近律;(b)—改进指数趋近律;(c)—图2b的局部放大图. |
基于指数趋近律与改进指数趋近律得到的积分滑模面响应曲线图分别见图 3a与图 3b.可以看出, 在指数趋近律下, 积分滑模面产生了抖振现象, 对图 3b进行局部放大得到图 3c, 可以看出对指数趋近律进行改进后, 从理论上消除了抖振现象.
图 3(Fig. 3)
 | 图 3 α=0.8时滑模面响应对比图Fig.3 Sliding surface responses comparison(α=0.8) (a)—传统指数趋近律;(b)—改进指数趋近律;(c)—图3b的局部放大图. |
4.2 1 < α < 2情况考虑分数阶α=1.2时的情形.初始状态取x0=x(t0)=x(0)=[1.5 2-1]T.
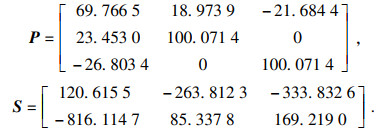
根据定理2, 求解不等式(21), 可得
 |
 |
注6??选取k1=3.5是为了验证, 即使选取较小的k1, 指数趋近律下的各响应仍会产生抖振现象, 说明了指数趋近律的局限性.
基于指数趋近律与改进指数趋近律得到的状态响应曲线图分别见图 4a与图 4b, 可以看出改进指数趋近律下的状态响应曲线, 在没有明显增加收敛时间和影响系统性能的前提下, 实现了曲线的平滑化.将状态响应图进行局部放大得到图 4c与图 4d, 此时可以看出基于指数趋近律的状态响应仍然存在小幅度的抖振现象,而基于改进指数趋近律的状态响应完全消除了抖振.
图 4(Fig. 4)
 | 图 4 α=1.2时状态响应对比图Fig.4 State responses comparison(α=1.2) (a)—传统指数趋近律;(b)—改进指数趋近律;(c)—图4a的局部放大图; (d)—图4b的局部放大图. |
基于指数趋近律与改进指数趋近律的滑模面响应曲线图分别见图 5a与图 5b, 局部放大图分别见图 5c与图 5d.4张图对比可以看出,改进的指数趋近律实现了响应曲线的平滑化, 并有效消除了抖振现象.
图 5(Fig. 5)
 | 图 5 α=1.2时滑模面响应对比图Fig.5 Sliding surface responses comparison(α=1.2) (a)—传统指数趋近律;(b)—改进指数趋近律;(c)—图5a的局部放大图; (d)—图5b的局部放大图. |
基于指数趋近律与改进指数趋近律得到的控制输入响应曲线图分别见图 6a与图 6b, 可以看出图 6a中控制输入产生了明显的抖振现象, 对图 6b进行局部放大得到图 6c, 可以看出抖振被完全消除了.
图 6(Fig. 6)
 | 图 6 α=1.2时控制输入响应对比图Fig.6 Control inputs comparison(α=1.2) (a)—传统指数趋近律;(b)—改进指数趋近律;(c)—图6b的局部放大图. |
5 结语本文研究了含有外部扰动的不确定分数阶广义系统的滑模控制问题.针对指数趋近律存在的抖振问题进行改善, 所设计的滑模控制器不仅可以有效消除抖振, 而且可以使各响应曲线平滑化, 提高了系统性能与运动品质, 并通过数值仿真验证了所提方法的有效性与优越性.
参考文献
| [1] | Oldham K B, Spanier J. The fractional calculus[M]. New York: Academic Press, 1974. |
| [2] | Kilbas A A, Srivastava H M, Trujillo J J. Theory and applications of fractional differential equations[M]. New York: Elsevier, 2006. |
| [3] | Samko S G, Kilbas A A, Marichev O I. Fractional integrals and derivatives: theory and applications[M]. Singapore: Gordon and Breach, 1993. |
| [4] | 刘金琨. 滑模变结构控制MATLAB仿真基本理论与设计方法[M]. 北京: 清华大学出版社, 2015. (Liu Jin-kun. Basic theory and design method of MATLAB simulation for variable sliding mode control[M]. Beijing: Tsinghua University Press, 2015.) |
| [5] | Sabanovic A. Variable structure systems with sliding modes in motion control-a survey[J]. IEEE Transactions on Industrial Informatics, 2011, 7(2): 212-223. DOI:10.1109/TII.2011.2123907 |
| [6] | Normane G, Ziadm I, Roberte K. Analysis of variable structure systems with sliding modes[J]. International Journal of Systems Science, 1984, 15(4): 401-409. DOI:10.1080/00207728408926571 |
| [7] | 高为炳. 变结构控制的理论及设计方法[M]. 北京: 科学出版社, 1996. (Gao Wei-bing. Theory and design method for variable sliding mode control[M]. Beijing: Science Press, 1996.) |
| [8] | Emelvanov S V, Krorovin S K, Levant A. High-order sliding modes in control systems[J]. Computational Mathematics and Modeling, 1996, 7(3): 294-318. DOI:10.1007/BF01128162 |
| [9] | Bandyopadhyay B, Janardhanan S, Spurgeon S K. Advances in sliding mode control[M]. New York: Springer-Verlag, 2013. |
| [10] | Beltran B, Ahmed-Ali T, Benbouzid M. High-order sliding mode control of variable-speed wind turbines[J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3314-3321. DOI:10.1109/TIE.2008.2006949 |
| [11] | Slotine J J E, Li W P. Applied nonlinear control[M]. Englewood Cliffs: Prentice-Hall, 1991. |
| [12] | Yu S, Yu X, Shirinzadeh B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964. DOI:10.1016/j.automatica.2005.07.001 |
| [13] | 梅红, 王勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38(5): 552-557. (Mei Hong, Wang Yong. Fast convergent sliding mode variable structure control of robot[J]. Information and Control, 2009, 38(5): 552-557. DOI:10.13976/j.cnki.xk.2009.05.021) |
| [14] | 张合新, 范金锁, 孟飞, 等. 一种新型滑模控制双幂次趋近律[J]. 控制与决策, 2013, 28(2): 289-293. (Zhang He-xin, Fan Jin-suo, Meng Fei, et al. A new double power reaching law for sliding mode control[J]. Control and Decision, 2013, 28(2): 289-293.) |
| [15] | Wheeler G, Su C Y, Stepanenko Y. A sliding mode controller with improved adaptation laws for the upper bounds on the norm of uncertainties[J]. Automatica, 1998, 34(12): 1657-1661. DOI:10.1016/S0005-1098(98)80024-1 |
| [16] | Meng B, Wang X H, Zhang Z Y, et al. Necessary and sufficient conditions for normalization and sliding mode control of singular fractional-order systems with uncertainties[J]. Science China: Information Sciences, 2020, 63(5): 183-192. |
| [17] | Gao Z, Liao X. Integral sliding mode control for fractional-order systems with mismatched uncertainties[J]. Nonlinear Dynamics, 2013, 72(1/2): 27-35. |
| [18] | Qian D, Ding H, Lee S G, et al. Suppression of chaotic behaviors in a complex biological system by disturbance observer-based derivative-integral terminal sliding mode[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(1): 126-135. DOI:10.1109/JAS.2019.1911834 |
| [19] | Jiang J F, Zhou X J, Zhao W, et al. A fast integral sliding mode controller with an extended state observer for position control of permanent magnet synchronous motor servo systems[J]. Frontiers of Information Technology &Electronic Engineering, 2020, 21(8): 1239-1250. |
| [20] | Podlubny I. Fractional differential equations[M]. New York: Academic Press, 1999. |
| [21] | 杨冬梅, 张庆灵, 姚波, 等. 广义系统[M]. 北京: 科学出版社, 2004. (Yang Dong-mei, Zhang Qing-ling, Yao Bo, et al. Singular systems[M]. Beijing: Science Press, 2004.) |
| [22] | Tavazoei M S, Haeri M. A note on the stability of fractional order systems[J]. Mathematics and Computers in Simulation, 2009, 79(5): 1566-1576. DOI:10.1016/j.matcom.2008.07.003 |
| [23] | Zhang X F, Chen Y Q. D-stability based LMI criteria of stability and stabilization for fractional order systems[C]//Proceedings of the ASME 2015 International Design Engineering Technical Conference and Computers and Information in Engineering Conference. Boston, 2015: 1-6. |
| [24] | Lu J G, Chen G. Robust stability and stabilization of fractional-order interval systems: an LMI approach[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1294-1299. DOI:10.1109/TAC.2009.2013056 |
| [25] | 薛定宇. 分数阶微积分学与分数阶控制[M]. 北京: 科学出版社, 2018. (Xue Ding-yu. Fractional calculus and fractional control[M]. Beijing: Science Press, 2018.) |
| [26] | 薛定宇. 控制系统计算机辅助设计——MATLAB语言与应用[M]. 北京: 清华大学出版社, 2012. (Xue Ding-yu. Computer aided design of control system-MATLAB language and its application[M]. Beijing: Tsinghua University Press, 2012.) |
