
 , 端维海, 姜孟超, 王元昊
, 端维海, 姜孟超, 王元昊 东北大学 机械工程与自动化学院,辽宁 沈阳 110819
收稿日期:2021-11-03
基金项目:国家自然科学基金资助项目(51775094)。
作者简介:赵春雨(1963-),男,辽宁黑山人,东北大学教授,博士生导师。
摘要:提出了一种双液压马达驱动振动沉桩机构,具有待机和沉桩两种自同步状态.介绍了其结构及工作原理,并建立了振动系统的动力学模型.推导出两激振器的无量纲耦合方程以及实现同步和同步稳定性判据,确定出两种状态的系统动力学参数范围.当桩机处于待机时,激振器处于远超共振状态,广义动态对称角为π,两偏心转子的激振力相互抵消;当桩机处于沉桩时,激振器处于亚共振状态,广义动态对称角为0,两偏心转子的激振力叠加.最终通过数值仿真进行了验证.
关键词:双液压马达驱动振动沉桩机构同步稳定性判据远超共振状态亚共振状态
Self-synchronization Theory of Pile Sinking System Driven by Dual Hydraulic Motors
ZHAO Chun-yu
, DUAN Wei-hai, JIANG Meng-chao, WANG Yuan-hao School of Mechanical Engineering & Automation, Northeastern University, Shenyang 110819, China
Corresponding author: ZHAO Chun-yu, E-mail: chyzhao@mail.neu.edu.cn.
Abstract: A dual hydraulic motor-driven vibrating pile sinking mechanism was proposed, which have two self-synchronization states of idle and pile sinking. The structure and working principle were introduced, and the dynamic model of the vibration system was established. The dimensionless coupling equation of the two vibration exciters and the criterion of synchronization and synchronization stability were deduced, and the system dynamic parameter range of the two states was determined. When the pile driver was in the idle state, the exciter worked on the far-super resonance state, the generalized dynamic symmetry angle equaled π, and the excitation forces of the two eccentric rotors were offset; when the pile driver was in the piling state, the exciter worked on the sub-resonance state, the generalized dynamic symmetry angle equaled 0, and the excitation forces of the two eccentric rotors were superimposed. Finally, it was verified by numerical simulation.
Key words: double hydraulic motor drivingvibrating pile sinking mechanismsynchronization stability criterionfar-super resonance statesub-resonance state
目前打桩机已广泛应用于工程实际中,其产品种类繁多,适用范围也较为不同.如螺旋式打桩机,桩机通过动力头带动钻杆钻头向下钻孔,成孔漂亮、清底干净,但只能打硬土,不适用于淤泥、黏土以及流沙等场所.柴油锤打桩机利用桩锤往复跳动的冲击力和桩体本身的重力来克服土层的阻力,进而实现沉桩;该桩机结构简单,在软土条件下,柴油锤在运行过程会出现失速现象,并且噪声较大,不适合城市打桩[1].液压静力压桩机使用高压油产生强大的静压力,将桩基逐步压入地下,工作平稳且噪声较小,但是该桩机体积过大,不便移动和小场所沉桩[2].振动沉桩机通过振动器产生激振力,使预制桩产生高频振动,桩体与周围土壤之间摩擦力以及桩端阻力减小,桩体在其与桩机自重作用下下沉,最终实现沉桩.振动沉桩机构造简单、使用方便、效能高、附属机设备少、噪声较小,符合城市打桩要求.
自第一台BT-5型振动沉桩机研发成功以来[3],振动沉桩机吸引了国内外****的关注.Bingham等[4]设计出双电机驱动两对齿轮同步偏心转子的振动沉桩机,并提出了桩与土壤接触参数的识别方法和依据土壤接触参数控制桩机振幅和频率的方法.但振动电机驱动能力有限,很难在大负荷下实现稳定控制,由于桩机采用齿轮刚性传动方式,系统无法实现自同步运行,齿轮传动系统也会因负载变化受到较大冲击力,造成齿轮损坏,降低桩机使用寿命.闻邦椿等[5]提出了研究多液压马达驱动的同步问题.Luo等[6]设计出双液压马达驱动偏心转子系统,分析了两液压马达结构、油温和阻尼系数等微小差异对耦合运动的影响,得到了同步运动的判据并提出了提高振动同步稳定性的相应措施.尽管振动沉桩机已经在系统与结构上取得了较大优化,但大部分沉桩系统仍处于亚共振状态,并未涉及远超共振等相关研究.在惯性振动筛的设计研究中,筛机工作状态处于远超共振状态,其工作频率远大于系统的固有频率,而在亚共振状态下,筛机无法妥善地消振,故亚共振状态很少采用[7].因此,有关不同共振系统在同一个振动机械上的应用问题仍有待解决.
本文提出了一种能够产生远超共振和亚共振两种状态的双液压马达驱动沉桩振动系统,并建立了该系统的动力学模型,推导出两种工况下系统的同步稳定性判据及其动力学参数范围,最终通过C语言程序对振动沉桩过程进行了计算机仿真.相较于其他双机振动系统,该系统拥有两种共振状态,当桩机处于待机状态时,振动系统处于远超共振状态,两偏心转子以π相位差同步运行,激振力相互抵消;当桩机处于沉桩状态时,振动系统处于亚共振状态,两偏心转子以0相位差同步运行,激振力相互叠加.
1 振动系统机构及工作原理图 1a为新型双液压马达驱动自同步振动沉桩机的结构示意图.桩机由起吊横梁1、机箱2、横梁筋板3、剪切橡胶弹簧4、金属板5、夹桩器6、电液传动系统7(电动机、液压泵和液压马达串联组成)、旋转轴8、偏心转子9以及套轴10等部分构成.两根旋转轴通过滚子轴承对称安装于机箱内部左右两侧,并与安装在机箱外部的液压马达相连接.每个偏心转子对称安装在旋转轴上,通过液压马达带动旋转轴,实现转子的转动.机箱通过套轴分别与横梁筋板和金属板连接,套轴与横梁筋板和金属板之间的轴孔采用间隙配合,同时为了限制激振器横向位移,套轴的轴肩只与金属板内侧相接触且不与横梁筋板接触.如图 1b所示,起吊横梁和金属板通过剪切橡胶弹簧连接.而其工作状态分为待机和打桩两种状态,如图 2所示.
图 1(Fig. 1)
 | 图 1 双液压马达驱动自同步振动沉桩机结构示意图Fig.1 Schematic diagram of the structure for the self-synchronizing vibrating pile sinking machine driven by dual hydraulic motor (a)—双液压马达驱动自同步振动沉桩机结构;(b)—局部放大剖视图. |
图 2(Fig. 2)
 | 图 2 沉桩机工作状态示意图Fig.2 Schematic diagram of the pile sinking machine working state (a)—待机状态;(b)—沉桩状态. |
2 系统动力学模型2.1 电机-泵-马达动力传动系统的驱动力矩液压传动具有传动平稳、调速方便、功率体积较大等特点,其广泛应用于各种领域[8],本文选用如图 3所示的双液压马达驱动振动沉桩机液压传动系统,能量传递过程如图 4所示.
图 3(Fig. 3)
 | 图 3 双液压马达驱动振动沉桩机液压传动系统Fig.3 Hydraulic transmission system of the vibrating pile sinking machine driver with dual hydraulic motors |
图 4(Fig. 4)
 | 图 4 振动沉桩机系统能量传递过程[9]Fig.4 Energy transmission process of the vibrating pile sinking system |
设液压马达容积效率为ηmv,理论流量为Qmt,转速为nm,故液压马达的实际输入流量Qm为
 | (1) |
忽略管路损失,则液压泵的实际输出流量Qb等于马达实际输入流量Qm,即Qb=Qm,则液压泵角速度ωb为
 | (2) |
电机角速度ωe等于液压泵的角速度ωb,即
 |
 | (3) |
 | (4) |
根据文献[9]得出稳态运行时电机的转矩:
 | (5) |
将式(4)代入式(3),得
 | (6) |
 | (7) |
若系统稳态运行时液压马达在其角速度为ωm0附近存在微小波动,设波动系数为ν,即
 | (8) |
 | (9) |
 |
图 5(Fig. 5)
 | 图 5 振动系统的动力学模型Fig.5 Dynamic model of the vibratory system |
振动系统的运动微分方程:
 | (10) |
3 两偏心转子的同步条件3.1 两偏心转子的无量纲耦合方程设当系统稳态运行时偏心转子的平均相位角为α,偏心转子1超前于φ为α, 偏心转子2落后于φ为α, 即φ=φ1-α=φ2+α[9].
由于系统运动是周期性变化,因而马达转速以相同周期变化.设稳态运行时两偏心转子的周期为T1和T2,取两偏心转子的最小公倍周期T0,则
 | (11) |
 | (12) |
 | (13) |


由式(13)得出系统运动微分方程的稳态相应解:
 | (14) |
 |

 | (15) |
 |
 | (16) |
 |
 |
 |
 | (17) |
 | (18) |
由|sin2α|≤1可得两马达同步运行的条件为
 | (19) |
3.3 双液压马达自同步稳定性条件若系统满足自同步运行条件时,由式(17)可得同步运行时的α和ωm0的数值解,表示为α0和ωm0*.将式(16)在2α0和ωm0*处线性化,设Δα= α-α0,并考虑

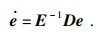 | (20) |
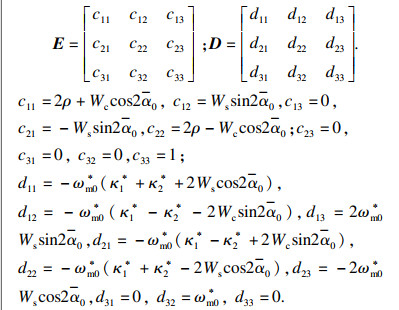 |
 | (21) |
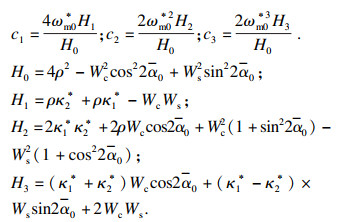 |
 | (22) |
 |
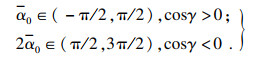 | (23) |
将各装置的参数值代入式(7)和式(9)中,计算得
 | (24) |
4.1 待机状态下系统的数值分析当桩锤被吊起时,套轴10下表面与金属板5接触,此时M=1 240 kg.选取频率比n=4,计算得出相位滞后角γ=177.87°以及振幅μ=1.066.由式(23)得出待机状态下稳态相位差2α=π.将式(24)代入式(17),计算得出系统在稳态相位值下的同步转速ωm0=104.12 rad/s.取剪切橡胶的阻尼系数ξn2=0.2,计算得出z方向的等效刚度和等效阻尼分别为:kz=840.18 kN/m,fz=12.91 kN · s/m.由TS=m0r2ωm02|Wc|计算得出TS=153.98 N/m,符合式(19)双液压马达同步运行的条件.图 6为待机状态下系统的同步稳定性分析结果,由图可知,当n=4时,系统的所有稳定性指标H0, H1, H3和H4值均大于0,满足式Routh-Hurwitz稳定性要求,即两偏心转子同步运行是稳定的.
图 6(Fig. 6)
 | 图 6 待机状态下的稳定性指标随参数rz的变化(n=4)Fig.6 Variation of the stability indices with parameter rz in the idle state(n=4) |
待机状态下稳态相位差2α=π,两偏心转子产生的激振力方向相反,故激振力会产生一个顺时针方向的力偶.而桩机左右两侧通过套轴与金属板接触,对桩机产生约束,故桩机总力耦为0.
4.2 沉桩状态下系统的数值分析在桩机打桩过程中,挖掘机机械臂对横梁施加一竖直向下的静力,套轴10上表面与横梁筋板3接触,此时设mc=760 kg, 故M=2 000 kg.选取转速比n=0.4,根据上述参数值可以计算出系统的以下振动参数:相位滞后角γ=33.69°,振动幅值μ=0.19.由式(23)得出待机状态下稳态相位差2α=0.将式(24)代入式(17),计算得出系统在稳态相位值下的同步转速ωm0=104.12 rad/s.取土壤的阻尼系数ξn1=0.7,横梁筋板的阻尼系数ξn3=0.07,计算得出z方向的等效刚度和阻尼分别为kz=8.4×104 kN/m,fz1=479 kN · s/m.
由TS=m0r2ωm02|Wc|计算得出TS=27.43 N/m,符合式(19)两马达同步运行的条件.图 7为沉桩状态下系统的同步稳定性分析结果,由图可知,当n=0.4时,系统的所有稳定性指标H0, H1, H3和H4值均大于0,满足式Routh-Hurwitz稳定性要求,即两偏心转子同步运行是稳定的.
图 7(Fig. 7)
 | 图 7 沉桩状态下的稳定性指标随参数rz的变化(n=0.4)Fig.7 Variation of the stability indices with parameter rz in the piling state(n=0.4) |
5 系统仿真分析5.1 待机状态下系统的仿真分析当桩机处于待机状态时,套轴10下表面与金属板5接触,系统处于远超共振状态.通过C语言编程对振动系统进行仿真分析,图 8为计算机仿真结果.由图可知:系统启动后,双液压马达转速从0逐渐增大,在2.1 s后进入同步运行状态,转速达到998.98 r/min,转子的稳态相位差为179.98°.桩机在z方向上的振幅随时间逐渐衰减,最终在3.5 s后振幅开始逐渐稳定于0,系统处于静止状态.
图 8(Fig. 8)
 | 图 8 待机状态下数值仿真结果Fig.8 Results of numerical simulations in the idle state (a)—稳态相位差;(b)—桩机位移;(c)—液压马达转速. |
5.2 沉桩状态下系统的仿真分析当桩机开始沉桩时,套轴10上表面与横梁筋板3接触,振动系统的刚度和阻尼发生改变,系统由远超共振状态转变为亚共振状态.通过C语言编程对系统进行仿真分析,图 9为沉桩状态下计算机仿真结果.由图可知:沉桩初期,双液压马达转速发生改变,系统在z方向上的位移发生波动.在0.6 s时,双液压马达再次进入同步运行状态,转速稳定于998.98 r/min,稳态相位差为1.2°,系统在z方向上的位移激励振幅稳定于1.4 mm.故桩机在满足沉桩要求的同时其上下往复波动较小,产生的噪声小,一定程度上延长了桩机的使用寿命.
图 9(Fig. 9)
 | 图 9 沉桩状态下数值仿真结果Fig.9 Results of numerical simulation in the piling state (a)—稳态相位差;(b)—桩机位移;(c)—液压马达转速. |
6 结论1) 本文提出了新型双液压马达驱动自同步振动沉桩机,利用刚度变化使系统处于两种工作状态:当桩机处于待机状态时,振动系统处于远超共振状态,广义动态对称角为π,激振力相互抵消;当桩机处于沉桩状态时,振动系统处于亚共振状态,广义动态对称角为0,激振力相互叠加.
2) 推导出偏心转子的无量纲耦合方程,得出了转子同步运行的条件及同步稳定性条件.数值计算结果表明:桩机在待机和沉桩两种不同状态下,系统均满足同步稳定性要求.
3) 通过计算机仿真表明:待机状态时,两个偏心转子的稳态相位差为179.98°;沉桩状态时,两个偏心转子的稳态相位差为1.2°,系统处于亚共振状态,满足桩机的工作需求,实现了桩机的沉桩目的.
参考文献
| [1] | Ruwan R. Pile design and construction rules of thumb Ⅱ[M]. New York: Butterworth Heinemann, 2016: 282-284. |
| [2] | Warrington D C. Theory and development of vibratory pile-driving equipment[C]//Houston Texas: Offshore Technology Conference, 1989. |
| [3] | Zhou X, He Q H, Zhu J X, et al. Research on the capacity of hydraulic pile driving under adding force[C]//2007 International Conference on Mechatronics and Automation. Harbin, 2007: 2032-2036. |
| [4] | Bingham C M, Stone D A, Schofield N, et al. Amplitude and frequency control of a vibratory pile driver[J]. IEEE Transactions on Industrial Electronics, 2000, 47(3): 623-631. |
| [5] | 闻邦椿, 赵春雨, 宋占伟. 机械系统的振动同步、控制同步与复合同步[J]. 工程设计, 1999(3): 1-5. (Wen Bang-chun, Zhao Chun-yu, Song Zhan-wei. Vibrating synchronization, control synchronization and compound synchronization of mechanical systems[J]. Engineering Design, 1999(3): 1-5.) |
| [6] | Luo C L, Mo X, Li J Y, et al. Coupling synchronization criterion of two hydraulic motors in an eccentric rotary vibration machine[J]. Shock and Vibration, 2019, 2019(1): 1-11. |
| [7] | 闻邦椿, 刘凤翘, 刘杰. 振动给料机振动筛振动输送机的设计与调试[M]. 北京: 化学工业出版社, 1989: 1-11. (Wen Bang-chun, Liu Feng-qiao, Liu Jie. Design and debugging of vibrating feeder, vibrating screen and vibrating conveyor[M]. Beijing: Chemical Industry Press, 1989: 1-11.) |
| [8] | 贺斌. 多刚体多激振器振动系统的自同步理论研究[D]. 沈阳: 东北大学, 2016. (He Bin. Theoretical research on self-synchronization of multi-rigid-body multi-exciter vibration system[D]. Shenyang: Northeastern University, 2016. ) |
| [9] | Zhao C Y, Zhu H T, Wang R Z, et al. Synchronization of two non-identical coupled exciters in a non-resonant vibrating system of linear motion, part I: theoretical analysis[J]. Shock and Vibration, 2009, 16(5): 505-516. DOI:10.1155/2009/259149 |
