
 , آ¹؛ئ1, آہ¶1, ¹®را¶«1
, آ¹؛ئ1, آہ¶1, ¹®را¶«1 1. ¶«±±´َر§ »ْذµ¹¤³جسë×ش¶¯»¯ر§ش؛£¬ءةؤ ةٍرô 110819;
2. ¶«±±´َر§ ؛½؟ص¶¯ء¦×°±¸صٌ¶¯¼°؟طضئ½جس²؟ضطµمتµرéتز£¬ءةؤ ةٍرô 110819
تص¸هبصئع£؛2021-08-19
»ù½ًدîؤ؟£؛ضذرë¸كذ£»ù±¾؟ئرذزµخٌ·رרدî×ت½ً×تضْدîؤ؟(N180313010)£»ءةؤت،×شب»؟ئر§»ù½ً×تضْدîؤ؟(2019-MS-124)،£
×÷صك¼ٍ½é£؛صإسي(1979-)£¬ؤذ£¬ءةؤ°°ة½بث£¬¶«±±´َر§¸±½جتع;
¹®را¶«(1958-)£¬ؤذ£¬ءةؤ±¾دھبث£¬¶«±±´َر§½جتع£¬²©ت؟ةْµ¼ت¦،£
صھزھ£؛صë¶ش؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ضؤ؟ا°´وشعµؤختج⣬جل³ِز»ضض»ùسع¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨(improved multi-objective firefly algorithm£¬IMOFA)µؤ؛½؟ص·¢¶¯»ْ¹ـآ·¶àؤ؟±êسإ»¯²¼¾ض·½·¨.شع¸أ·½·¨ضذ£¬ت×دبزش¹ـآ·³¤¶ب×î¶ج،¢حنح·ت×îةظزش¼°ؤـء؟ضµ×îذ،خھسإ»¯ؤ؟±ê£¬½¨ء¢ءث؛½؟ص·¢¶¯»ْ¹ـآ·¶àؤ؟±êسإ»¯²¼¾ضتر§ؤ£ذح.ب»؛َ£¬½ل؛د×شتتس¦بإ¶¯²كآش؛ح¾«س¢²كآش£¬جل³ِءثز»ضضس¦سأسع؛½؟ص·¢¶¯»ْ¹ـآ·¶àؤ؟±êسإ»¯²¼¾ضµؤ¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨£¬´س¶ّتµدضءث؛½؟ص·¢¶¯»ْ¹ـآ·µؤ¶àؤ؟±êسإ»¯²¼¾ض.×î؛َ£¬ح¨¹تµہرéض¤ءثثùجل³ِ·½·¨µؤ؟ةذذذش؛حسذذ§ذش.
¹ط¼ü´ت£؛؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ض¶àؤ؟±êس©»ً³وثم·¨¾«س¢²كآش·اض§إن½â
Multi-objective Optimization Layout of Aero-Engine Pipe Routing Based on IMOFA
ZHANG Yu1,2
, LU Hao1, LYU Dong1, GONG Ya-dong1 1. School of Mechanical Engineering & Automation, Northeastern University, Shenyang 110819, China;
2. Key Laboratory of Vibration and Control of Aero-Propulsion System, Ministry of Education, Northeastern University, Shenyang 110819, China
Corresponding author: ZHANG Yu, E-mail: zy4097534@126.com.
Abstract: To solve the existing problems of pipe routing layout for aero-engines, a multi-objective optimization layout method of aero-engine pipe routing based on improved multi-objective firefly algorithm(IMOFA) is proposed. In the method, the multi-objective optimization layout mathematical model of aero-engine pipe routing is established, which takes the shortest pipe length, the least number of elbows, and the minimal energy value as the optimization objectives. Then, by combining with adaptive disturbance strategy and elite strategy, an IMOFA algorithm for multi-objective optimization layout of aero-engine pipe routing is provided, which realizes the multi-objective optimal layout of aero-engines pipe routing. Finally, the feasibility and effectiveness of the proposed method is verified by case studies.
Key words: aero-enginepipe routing layoutmulti-objective firefly algorithm (MOFA)elite strategynon-dominated solution
¹ـآ·دµح³تا؛½؟ص·¢¶¯»ْµؤضطزھ×é³ة²؟·ض£¬ئن²¼¾ضةè¼ئضتء؟ردضطس°دى×إ؛½؟ص·¢¶¯»ْµؤذشؤـ،¢ت¹سأتظأü؛ح³ة±¾.شعتµ¼تةْ²ْضذ£¬؛½؟ص·¢¶¯»ْµؤ¹ـآ·²¼¾ضةè¼ئض÷زھسة¾رé·ل¸»µؤ¹¤³جت¦تض¹¤حê³ة£¬صâضض´«ح³µؤةè¼ئ·½·¨·ا³£؛ؤت±£¬ز²ؤرزش»ٌµأ×î¼رµؤ¹ـآ·²¼¾ض£¬¼«´َµط×è°ءث؛½؟ص¹¤زµµؤ·¢ص¹.زٍ´ث£¬؛½؟ص·¢¶¯»ْ×ش¶¯¹ـآ·²¼¾ضةè¼ئزر³ةخھط½´½â¾ِµؤببµمختجâ.
¹ْؤعحâ****؛حرذ¾؟»ْ¹¹¶ش¹ـآ·×ش¶¯²¼¾ض×÷ءث؛ـ¶àسذزâزهµؤرذ¾؟.Christodoulouµب[1]²ةسأزدب؛ثم·¨½â¾ِءث³اتذإنث®¹ـآ·µؤ²¼¾ض.¶×عب»µب[2]جل³ِز»ضض×î¶جآ·¾¶؟ىثظثم·¨£¬²¢²ةسأ¸أثم·¨تµدضءث´¬²°¹ـآ·µؤ×ش¶¯·َةè.Liu[3]جل³ِءثز»ضض»ùسعآü¹¶ظ؟ةتسح¼µؤ¹ـآ··َةèثم·¨£¬سأزشر°صز؛½؟ص·¢¶¯»ْ¹ـآ·×î¶جآ·¾¶.ةدتِخؤد׶¼²àضط؟¼آا¹ـآ·³¤¶ب×î¶جخھسإ»¯ؤ؟±ê£¬سإ»¯ؤ؟±êµ¥ز»£¬µ¼ضآ²¼¾ضذ§¹û²»ہيدë.؟¼آا¹ـآ·³¤¶ب×î¶ج؛ححنح·ت×îةظ×÷خھ¹ـآ·²¼¾ضسإ»¯ؤ؟±ê£¬Jiangµب[4]جل³ِءثز»ضضذح¬½ّ»¯¶àزدب؛سإ»¯ثم·¨µؤ´¬²°¹ـآ·²¼¾ضةè¼ئ·½·¨£»Quµب[5]س¦سأ3Dء¬½سح¼؛ح²¢ذذزدب؛سإ»¯ثم·¨¶ش؛½؟ص·¢¶¯»ْ¹ـآ·½ّذذءث²¼¾ضسإ»¯£»Minµب[6]جل³ِءثز»ضض»ùسعجّµمثرث÷µؤ¹ـµہ×ش¶¯²¼دكثم·¨.´ثح⣬صش°طفوµب[7]جل³ِز»ضض»ùسع؟ىثظہ©ص¹ثو»ْت÷ثم·¨؛حؤ£ؤâحث»ًثم·¨µؤ؛½؟ص·¢¶¯»ْ¹ـآ·×ش¶¯²¼¾ضسëسإ»¯·½·¨£¬¸أ·½·¨½â¾ِءثزش¹ـآ·³¤¶ب×î¶ج؛حء÷×è×îذ،خھسإ»¯ؤ؟±êµؤ¹ـآ·²¼¾ضختجâ.؟¼آا¹ـآ·³¤¶ب×î¶ج،¢حنح·ت×îةظ؛حؤـء؟ضµ×îذ،×÷خھ¹ـآ·²¼¾ضسإ»¯ؤ؟±ê£¬Wuµب[8]²ةسأ¸ؤ½ّµؤزدب؛سإ»¯ثم·¨¶ش°ëا±ت½²ةسحئ½ج¨µؤ¹ـآ·²¼¾ضختجâ½ّذذءثرذ¾؟£»Dongµب[9]½«A*ثم·¨؛حزإ´«ثم·¨دà½ل؛د¶ش´¬²°¹ـآ·²¼¾ضختجâ½ّذذءثرذ¾؟.ةدتِخؤد×ثنب»؟¼آاءث¶à¸ِسإ»¯ؤ؟±ê£¬µ«¶¼تاح¨¹¼سب¨µؤ·½ت½½«¹ـآ·µؤ¶àؤ؟±êسإ»¯²¼¾ضختجâ×ھ»¯خھµ¥ؤ؟±ê½ّذذسإ»¯£¬²¢أ»سذصوص½â¾ِ¶àؤ؟±êسإ»¯ختج⣬µ¼ضآ²¼¾ضذ§¹ûا·¼ر.
×غةدثùتِ£¬ثنب»صâذ©رذ¾؟¹¤×÷ب،µأءثز»¶¨³ة¹û£¬µ«ؤ؟ا°رذ¾؟ض»صë¶شµ¥¸ِؤ؟±ê»ٍ½«¶à¸ِؤ؟±êزشدكذش¼سب¨µؤ·½ت½×ھ»¯خھµ¥¸ِؤ؟±ê½ّذذ¹ـآ·×ش¶¯سإ»¯²¼¾ض£¬صâµ¼ضآ¹ـآ·²¼¾ضضتء؟²»¼ر.¶àؤ؟±êس©»ً³وثم·¨[10]تاز»ضضئô·¢ت½ب؛ضاؤـسإ»¯ثم·¨£¬¾كسذ²ختةèضأةظ،¢آ³°ôذش؛حر°سإؤـء¦ا؟µبسإµم£¬تتسأسع½â¾ِ¶àؤ؟±êسإ»¯ختجâ.زٍ´ث£¬صë¶شةدتِختج⣬±¾خؤ¶ش»ùسع¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨µؤ؛½؟ص·¢¶¯»ْ¹ـآ·ضاؤـ²¼¾ض·½·¨½ّذذءثرذ¾؟.
1 ¹ـآ·²¼¾ضتر§ؤ£ذحز»¸ِµنذحµؤ؛½؟ص·¢¶¯»ْح¨³£°ü؛¬ت°ظ¸ù¹ـآ·£¬صâذ©¹ـآ·شع²¼¾ض¹³جضذ²»½ِزھ؟¼آا؟ص¼ندقضئ£¬¶ّاز»¹زھ؟¼آا¶àرùµؤةè¼ئزھاَ؛حضع¶àµؤ¹¤³ج¹وشٍ£¬صâت¹µأ؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ض³ةخھ¶àؤ؟±ê¸´شسسإ»¯ختج⣬شعہيآغةدتôسعNP-hardختجâ.؟¼آاµ½¹ـآ·²¼¾ضµؤ¾¼أذش؛ح؟ة؟؟ذشةè¼ئزھاَزش¼°¹¤³ج¹وشٍ£¬±¾خؤزش¹ـآ·آ·¾¶×î¶ج،¢¹ـآ·حنح·×îةظ؛ح¹ـآ·ؤـء؟ضµ×îذ،×÷خھسإ»¯ؤ؟±ê£¬²¢؟¼آاحناْ°ë¾¶؛ح¼ذ½اµبش¼تّجُ¼£¬½¨ء¢ءث؛½؟ص·¢¶¯»ْ¹ـآ·¶àؤ؟±êسإ»¯²¼¾ضتر§ؤ£ذح.
1.1 ؤ؟±ê؛¯تخھءث¼ُةظ¹ـآ·²¼¾ضµؤ³ة±¾؛حجل¸ك¹ـآ·²¼¾ضµؤ؟ة؟؟ذش£¬ثù½¨ء¢µؤ¹ـآ·²¼¾ضؤ؟±ê؛¯تبçدآ£؛
1) ¹ـآ·³¤¶بؤ؟±ê؛¯ت
 | (1) |
2) ¹ـآ·حنح·تؤ؟±ê؛¯ت
 | (2) |



3) ¹ـآ·ؤـء؟ؤ؟±ê؛¯ت
 | (3) |


1.2 ش¼تّجُ¼¸ù¾ف¹ـآ·²¼¾ضµؤ¹¤³ج¹وشٍ[11], ±¾خؤثù؟¼آاµؤش¼تّجُ¼بçدآ£؛
1) حناْ°ë¾¶ش¼تّ
 | (4) |
2) ¼ذ½اش¼تّ
 | (5) |
3) ض±¶خ³¤¶بش¼تّ
 | (6) |
4) ¾àہëش¼تّ
 | (7) |
5) ؟ç¶بش¼تّ
 | (8) |
1.3 تر§ؤ£ذح»ùسعزشةدجضآغ£¬½«¹ـآ·½عµم×ّ±ê×÷خھ±نء؟£¬°ر¹ـآ·²¼¾ضضذµؤ¹¤³جزھاَ×÷خھش¼تّجُ¼£¬زش×î¶ج¹ـآ·آ·¾¶،¢×îةظ¹ـآ·حنح·؛ح×îذ،¹ـآ·ؤـء؟ضµخھسإ»¯ؤ؟±ê½¨ء¢µؤ¹ـآ·²¼¾ضتر§ؤ£ذحخھ
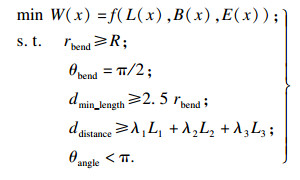 | (9) |
ح¼ 1(Fig. 1)
 | ح¼ 1 »ùسع¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨µؤ؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ضء÷³جح¼Fig.1 The flowchart of the aero-engine pipe routing layout based on IMOFA |
1) س©»ً³و±àآë.س©»ً³و±àآë²ةسأ±ن³¤¶ب±àآëµؤ·½ت½£¬±àآë·½ت½بçدآ£؛
 | (10) |
2) ³ُت¼»¯²خت.ةèضأضضب؛¹وؤ£N£¬×î´َخüز¶ب¦آ0£¬¹âا؟خüتصدµت¦أ£¬×î´َµü´ْ´ختTmax£¬¾«س¢½â¼¯´َذ،M.
3) ²¼¾ض؟ص¼نش¤´¦ہي.ح¨¹½«²¼¾ض؟ص¼نرط»ْد»ؤ¸دكص¹؟ھ3´خ²¢½ّذذئ´½س£¬´س¶ّتµدض»ط×ھجه²¼¾ض؟ص¼ندٍء¢·½جه²¼¾ض؟ص¼نµؤ×ھ»¯£¬بçح¼ 2ثùت¾.
ح¼ 2(Fig. 2)
 | ح¼ 2 ²¼¾ض؟ص¼نش¤´¦ہيت¾زâح¼Fig.2 Schematic diagram of the preprocessed layout space |
4) ةْ³ة³ُت¼ضضب؛.خھءثµأµ½¶àجُ²»ح¬µؤ؟ةذذ³ُت¼آ·¾¶£¬ح¨¹شِ´َآ·¾¶½عµمµؤئô·¢ت½´ْ¼غضµہ´¸ؤ½ّ´«ح³A*ثم·¨[14]£¬´س¶ّةْ³ة¶àجُ²»ح¬آ·¾¶£¬½ّ¶ّµأµ½³ُت¼ضضب؛.
5) ¼ئثمس©»ً³وتتس¦¶ب.خھءثجلة¹ـآ·¸ِجهر°سإضتء؟؛حذ§آت£¬±¾خؤ»ùسع·اض§إن¹طدµ،¢سµ¼·¶ب؛حش¼تّخ¥·´ضµ½¨ء¢¸ِجه¶àؤ؟±êتتس¦¶ب؛¯ت£¬ئنض÷زھث¼آ·خھ£؛ح¨¹·اض§إن¹طدµ¶شضضب؛¸ِجه½ّذذ·اض§إن·ض²م£¬¼´بç¹û¸ِجهA(L, B, E)£¼¸ِجهB(L, B, E)£¬شٍ±يت¾¸ِجهAض§إن¸ِجهB£¬ح¨¹¸أضض·½ت½¶شضضب؛ضذبخزâ2¸ِ¸ِجه½ّذذ±ب½د£¬½ّ¶ّتµدض¸ِجهµؤ·اض§إن·ض²م.شع´ث»ù´،ةد£¬»ùسعسµ¼·¶ب؛حش¼تّخ¥·´ضµ¶شح¬ز»²مµؤ·اض§إن¸ِجه½ّذذإإذٍ£¬¼´¶شسعآْ×مش¼تّµؤ¸ِجه£¬²ةسأت½(11)¼ئثمئنسµ¼·¶بتµدضح¬ز»²م¸ِجهµؤسإءسئہ¼غ£»¶شسعخ¥·´ش¼تّµؤ¸ِجه£¬²ةسأت½(12)¼ئثمش¼تّخ¥·´ضµ£¬تµدضح¬ز»²م¸ِجهسإءسئہ¼غ.½ّ¶ّ£¬ح¨¹ضضب؛µؤ×î´َض§إن²مت،¢¸ِجهثùشعµؤ·اض§إن²مت؛ح¸ِجهثùشع·اض§إن²مµؤسإءس³ج¶بہ´½¨ء¢س©»ً³و¸ِجهµؤ¶àؤ؟±êتتس¦¶ب؛¯تF(x).
 | (11) |
 | (12) |
 | (13) |
6) ةْ³ة¾«س¢½â¼¯. ¸ù¾فت½(13)¼ئثم³ُت¼ضضب؛ضذس©»ً³وµؤتتس¦¶ب£¬±£ءôµ±´ْ×îسإµؤ·اض§إن½â£¬½ّ¶ّةْ³ة¾«س¢½â¼¯.
7) ¼ئثمدà¶شءء¶ب،¢خüز¶ب.¸ù¾فت½(14)£¬¼ئثمس©»ً³وµؤدà¶شءء¶ب£؛
 | (14) |
 | (15) |
¸ù¾فت½(16)£¬¼ئثمس©»ً³وµؤخüز¶ب£؛
 | (16) |
8) س©»ً³و·ةذذ.ر،ب،µعi¸ِس©»ً³و£¬µ±´وشعµعj¸ِس©»ً³وµؤدà¶شءء¶ب¸كسعµعi¸ِس©»ً³وµؤدà¶شءء¶بت±£¬ر،ب،µعj¸ِس©»ً³وضذتتس¦¶ب×î¸كµؤز»¶خآ·¾¶×÷خھ¼ج³ذآ·¾¶(¼ج³ذآ·¾¶شعµعj¸ِس©»ً³وضذµؤص¼±بخھخüز¶ب¦آ)£¬سأ¼ج³ذآ·¾¶جو»»µعi¸ِس©»ً³وضذدà¶شس¦µؤآ·¾¶¶خ£¬²¢سأ¸ؤ½ّA*ثم·¨½ّذذدخ½س£¬ةْ³ةذآµؤآ·¾¶£¬µأµ½س©»ً³وi،ن£»بô²»´وشعµعj¸ِس©»ً³وµؤدà¶شءء¶ب¸كسعµعi¸ِس©»ً³وµؤدà¶شءء¶ب£¬شٍ¶شµعi¸ِس©»ً³وض´ذذ²½ضè9).
9) س©»ً³و×شتتس¦بإ¶¯.خھءثجل¸كثم·¨µؤب«¾ضثرث÷ؤـء¦£¬±¾خؤ²ةسأ×شتتس¦بإ¶¯²كآش½ّذذس©»ً³و¸ِجه¸üذآ£¬ئنض÷زھث¼دëخھ£؛س©»ً³وتتس¦¶بش½µح£¬ئنبإ¶¯ش½´َ£¬´س¶ّجلةس©»ً³ور°سإµؤضتء؟؛حذ§آت.¾كجه²½ضèخھ£؛ر،ب،س©»ً³وi،نضذتتس¦¶ب×îµحµؤز»¶خآ·¾¶(¸أ¶خآ·¾¶شعس©»ً³وi،نضذص¼±بخھ¦ء|rand-1/2|£¬ئنضذ×شتتس¦بإ¶¯زٍ×س¦ء=(I0max-I0)/( I0max-I0min)£¬I0maxخھµ±ا°ضضب؛تتس¦¶ب×î¸كµؤس©»ً³وµؤ×î´َس«¹âءء¶ب£¬I0minخھµ±ا°ضضب؛تتس¦¶ب×îµحµؤس©»ً³وµؤ×î´َس«¹âءء¶ب)£¬س¦سأ¸ؤ½ّA*ثم·¨ضطذآةْ³ة¸أجُآ·¾¶£¬µأµ½س©»ً³وi،ه£¬¼ئثمس©»ً³وi،ن؛حس©»ً³وi،هµؤتتس¦¶ب£¬±£ءôتتس¦¶ب×î¸كµؤس©»ً³و.
10) إذ¶دµ±´ْضضب؛تا·ٌ¸üذآحê±د.بç¹ûµ±´ْثùسذس©»ً³وحê³ةخ»ضأ¸üذآ£¬شٍ½ّذذدآز»²½£¬·ٌشٍ·µ»ط²½ضè8).
11) ¸üذآس©»ً³وتتس¦¶ب.¸ù¾فت½(13)£¬¼ئثمخ»ضأ¸üذآ؛َµؤس©»ً³وµؤتتس¦¶ب.
12) ¸üذآ¾«س¢½â¼¯.½«خ»ضأ¸üذآ؛َµؤ·اض§إن½âجي¼سضء¾«س¢½â¼¯£¬²¢¸ù¾فت½(13)µأµ½¾«س¢½â¼¯µؤذآµؤ·اض§إن½â.
13) ضصض¹جُ¼إذ¶د.ضصض¹جُ¼خھµü´ْ´خت.بç¹ûآْ×م£¬´س¾«س¢½â¼¯ضذتن³ِPareto½â¼¯£¬·ٌشٍض´ذذ¾«س¢²كآش£¬¼´½«µ±ا°ضضب؛ضذتتس¦¶ب×îµحµؤس©»ً³وجو»»خھ¾«س¢½â¼¯ضذتتس¦¶ب×î¸كµؤس©»ً³و£¬²¢·µ»ط²½ضè7).
3 ثم·¨ذشؤـ·ضخِسëتµہرذ¾؟3.1 ثم·¨ذشؤـ·ضخِشعMATLABضذةèضأضضب؛¹وؤ£N=50£¬×î´َµü´ْ´ختTmax=1 000£¬¾«س¢½â¼¯´َذ،M=100£¬س¦سأ²âتش؛¯تCF1(¼ûت½(17))¶ش¾µن¶àؤ؟±êء£×سب؛سإ»¯(multi-objective particle swarm optimization, MOPSO)ثم·¨[15]،¢´«ح³¶àؤ؟±êس©»ً³وثم·¨(multi-objective firefly algorithm, MOFA)؛ح±¾خؤجل³ِµؤ¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨½ّذذءثذشؤـ¶ش±ب·ضخِ£¬بçح¼ 3ثùت¾.
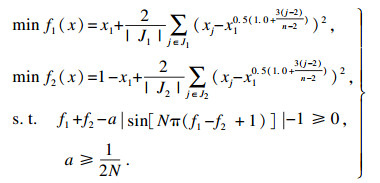 | (17) |
 | ح¼ 3 بضضثم·¨ذشؤـ¶ش±بFig.3 Performance comparison of three algorithms (a)،ھIGDض¸±ê¶ش±ب£»(b)،ھPareto×îسإ½â¼¯¶ش±ب. |
IGDض¸±êتا·´س³ثم·¨تصء²ذش،¢¾ùشبذش؛ح·ض²¼ذشµؤ×غ؛دض¸±ê£¬ئنضµش½ذ،ش½½س½üسع0£¬ثم·¨µؤذشؤـش½؛أ.سةح¼ 3a؟ةزش؟´³ِ£¬¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨µؤIGDت¼ضصذ،سع¾µن¶àؤ؟±êء£×سب؛سإ»¯ثم·¨؛ح´«ح³¶àؤ؟±êس©»ً³وثم·¨µؤIGD£¬µ½µع240´خµü´ْت±¼¸؛ُ½س½üسع0£¬¹ت¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨µؤتصء²ذش،¢¾ùشبذش؛ح·ض²¼ذش¸ü؛أ.سةح¼ 3b؟ةزش؟´³ِ£¬¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨اَµأµؤPareto×îسإ½â¼¯؛ـ؛أµطؤâ؛دءثصوتµParetoا°رط£¬½ّز»²½رéض¤ءثثùجلثم·¨µؤذشؤـسإش½ذش.
3.2 تµہرذ¾؟ح¼ 4¸ّ³ِءثؤ³؛½؟ص·¢¶¯»ْبخ¬ؤ£ذح£¬¸أؤ£ذح°ü؛¬18¸ِصد°خ¹ـآ·²¼¾ض؟ص¼ن·¶خ§خھ¦ب،ت[0, 2¦ذ]£¬y،ت[0, 2 000]£¬r،ت[250, 850]£¬·َةè¹ـآ·µؤح⾶خھ15 mm.ةèضأضضب؛¹وؤ£N=10£¬×î´َخüز¶ب¦آ0=1£¬¹âا؟خüتصدµت¦أ=1£¬×î´َµü´ْ´ختTmax=30£¬¾«س¢½â¼¯´َذ،M=20£¬¼سثظ¶بدµتc1=c2=1.496 2£»¹كذشب¨ضطدµت¦ط=0.729 8.
ح¼ 4(Fig. 4)
 | ح¼ 4 ؤ³؛½؟ص·¢¶¯»ْ²¼¾ض؟ص¼نبخ¬ؤ£ذحFig.4 Three-dimensional model of an aero-engine |
ح¨¹MATLAB·ض±ً»ùسع¾µن¶àؤ؟±êء£×سب؛سإ»¯ثم·¨،¢´«ح³¶àؤ؟±êس©»ً³وثم·¨؛ح¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨µأµ½ةدتِ؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ضPareto½â¼¯£¬بç±ي 1~±ي 3ثùت¾.سة±ي 1؟ةضھ£¬ح¨¹¾µن¶àؤ؟±êء£×سب؛سإ»¯ثم·¨؟ةزشµأµ½3¸ِ·اض§إن½â£¬·اض§إن½â1µؤ¹ـآ·حنح·ت×îةظ£¬·اض§إن½â2µؤ¹ـآ·³¤¶ب×î¶ج£¬·اض§إن½â3ؤـء؟ضµ×îذ،, ¸÷¸ِ½â¸÷سذئنسإتئ£¬د໥خھ·اض§إن¹طدµ.سة±ي 2؟ةضھ£¬ح¨¹´«ح³¶àؤ؟±êس©»ً³وثم·¨µأµ½4¸ِ·اض§إن½â£¬ئنضذ·اض§إن½â1µؤ¹ـآ·حنح·ت×îةظ£¬·اض§إن½â2µؤ¹ـآ·³¤¶ب×î¶ج£¬·اض§إن½â4ؤـء؟ضµ×îذ،£¬·اض§إن½â3خھصغضذ½â£¬¸÷¸ِ½â¸÷سذئنسإتئ£¬د໥خھ·اض§إن¹طدµ.سة±ي 3؟ةزش؟´³ِ£¬ح¨¹¸ؤ½ّµؤ¶àؤ؟±êس©»ً³وثم·¨؟ةزشµأµ½5¸ِ·اض§إن½â£¬·اض§إن½â1µؤ¹ـآ·حنح·ت×îةظ£¬·اض§إن½â2µؤ¹ـآ·³¤¶ب×î¶ج£¬·اض§إن½â5ؤـء؟ضµ×îذ،£¬·اض§إن½â3؛ح·اض§إن½â4خھ2¸ِصغضذ½â£¬¸÷¸ِ½â¸÷سذئنسإتئ£¬د໥خھ·اض§إن¹طدµ.¶ش±ب±ي 1،¢±ي 2؛ح±ي 3؟ةزش؟´³ِ£¬±ي 3ضذ·اض§إن½â¸ِت¶àسع±ي 1؛ح±ي 2ضذ·اض§إن½â¸ِت£¬از±ي 1؛ح±ي 2ضذµؤ·اض§إن½âئص±é±»±ي 3ضذµؤ·اض§إن½âثùض§إن.شع´ث»ù´،ةد£¬س¦سأUG(unigraphics)ةْ³ةµؤ؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ضبخ¬ؤ£ذح£¬بçح¼ 5ثùت¾.
±ي 1(Table 1)
| ±ي 1 »ùسع¾µن¶àؤ؟±êء£×سب؛سإ»¯ثم·¨µؤ¹ـآ·²¼¾ضPareto½â¼¯ Table 1 Pareto solution set for pipe routing obtained by classical MOPSO algorithm |
±ي 2(Table 2)
| ±ي 2 »ùسع´«ح³¶àؤ؟±êس©»ً³وثم·¨µؤ¹ـآ·²¼¾ضPareto½â¼¯ Table 2 Pareto solution set for pipe routing obtained by traditional MOFA |
±ي 3(Table 3)
| ±ي 3 »ùسع¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨µؤ¹ـآ·²¼¾ضPareto½â¼¯ Table 3 Pareto solution set for pipe routing obtained by IMOFA |
ح¼ 5(Fig. 5)
 | ح¼ 5 »ùسع¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨µؤ¹ـآ·²¼¾ضبخ¬ؤ£ذحFig.5 The 3D model of pipe routing layout based on IMOFA (a)،ھ·اض§إن½â1£»(b)،ھ·اض§إن½â2£»(c)،ھ·اض§إن½â3£»(d)،ھ·اض§إن½â4£»(e)،ھ·اض§إن½â5. |
4 ½لآغ1) زش×î¶ج¹ـآ·³¤¶ب،¢×îةظحنح·ت؛ح×îذ،ؤـء؟ضµخھسإ»¯ؤ؟±ê£¬²¢×غ؛د؟¼آاحناْ°ë¾¶،¢¼ذ½ا،¢³¤¶ب،¢¾àہë؛ح؟ç¶بش¼تّجُ¼£¬½¨ء¢ءث½دب«أوµؤ؛½؟ص·¢¶¯»ْ¹ـآ·¶àؤ؟±êسإ»¯²¼¾ضتر§ؤ£ذح£¬خھتµدض¹ـآ·²¼¾ضµؤ¶àؤ؟±êسإ»¯µى¶¨ءثء¼؛أµؤ»ù´،.
2) ½ل؛د·اض§إن¹طدµ،¢سµ¼·¶ب؛حش¼تّخ¥·´ضµ£¬جل³ِءثز»ضضذآس±µؤ¹ـآ·¶àؤ؟±êئہ¼غ·½°¸£¬خھجلة¹ـآ·¸ِجهر°سإضتء؟؛حذ§آتجل¹©ءثجُ¼.
3) بع؛د×شتتس¦بإ¶¯²كآش؛ح¾«س¢²كآش£¬جل³ِز»ضض¸ؤ½ّ¶àؤ؟±êس©»ً³وثم·¨£¬»ٌµأ½د؛أµؤ·û؛د¹¤³ججُ¼µؤ¶àضض؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ض·½°¸£¬جل¸كءث¹ـآ·²¼¾ضضتء؟؛حذ§آت£¬خھتµدض¹ـآ·ضاؤـ»¯²¼¾ضةè¼ئجل¹©سذء¦µؤ¼¼تُض§³إ.
²خ؟¼خؤد×
| [1] | Christodoulou S E, Ellinas G. Pipe routing through ant colony optimization[J]. Journal of Infrastructure Systems, 2010, 16(2): 149-159. DOI:10.1061/(ASCE)1076-0342(2010)16:2(149) |
| [2] | ¶×عب», ءضرو. »ùسع×î¶جآ·¾¶؟ىثظثم·¨µؤ´¬²°¹ـآ·×ش¶¯·َةè·½·¨[J]. ¼ئثم»ْ¼¯³ةضئشىدµح³, 2014, 20(12): 2962-2972. (Dong Zong-ran, Lin Yan. Automatic ship pipe routing method based on the shortest path fast algorithm[J]. Computer Integrated Manufacturing Systems, 2014, 20(12): 2962-2972.) |
| [3] | Liu Q. A rectilinear pipe routing algorithm: Manhattan visibility graph[J]. International Journal of Computer Integrated Manufacturing, 2016, 29(2): 202-211. |
| [4] | Jiang W Y, Lin Y, Chen M, et al. A co-evolutionary improved multi-ant colony optimization for ship multiple and branch pipe route design[J]. Ocean Engineering, 2015, 102: 63-70. DOI:10.1016/j.oceaneng.2015.04.028 |
| [5] | Qu Y F, Jiang D, Yang Q Y. Branch pipe routing based on 3D connection graph and concurrent ant colony optimization algorithm[J]. Journal of Intelligent Manufacturing, 2018, 29(7): 1647-1657. DOI:10.1007/s10845-016-1203-4 |
| [6] | Min J G, Ruy W S, Park C S. Faster pipe auto-routing using improved jump point search[J]. International Journal of Naval Architecture and Ocean Engineering, 2020, 12: 596-604. DOI:10.1016/j.ijnaoe.2020.07.004 |
| [7] | صش°طفو, ءُ¼ى»ھ, ؤبêذآ, µب. ز»ضض»ùسع¹¤³ج¹وشٍµؤ¹ـآ·×ش¶¯²¼¾ضسë×غ؛دسإ»¯¼¼تُ[J]. »ْذµ¹¤³جر§±¨, 2015, 51(21): 121-131. (Zhao Bo-xuan, Liu Jian-hua, Ning Ru-xin, et al. An automatic pipe routing and optimization technology based on engineering constraints[J]. Journal of Mechanical Engineering, 2015, 51(21): 121-131.) |
| [8] | Wu L, Tian X, Wang H Y, et al. Improved ant colony optimization algorithm and its application to solve pipe routing design[J]. Assembly Automation, 2019, 39(1): 45-57. DOI:10.1108/AA-02-2018-022 |
| [9] | Dong Z R, Bian X Y. Ship pipe route design using improved A* algorithm and genetic algorithm[J]. IEEE Access, 2020, 8: 153273-153296. DOI:10.1109/ACCESS.2020.3018145 |
| [10] | Yang X S. Multiobjective firefly algorithm for continuous optimization[J]. Engineering with Computers, 2013, 29(2): 175-184. DOI:10.1007/s00366-012-0254-1 |
| [11] | °×دہ¼. ؛½؟ص·¢¶¯»ْ¹ـآ·²¼¾ضضاؤـةè¼ئ·½·¨رذ¾؟[D]. ةٍرô: ¶«±±´َر§, 2013. (Bai Xiao-lan. Research on intelligent methods of aeroengine pipe-routing design[D]. Shenyang: Northeastern University, 2013. ) |
| [12] | Yang X S. Nature-inspired metaheuristic algorithms[M]. Beckington: Luniver Press, 2008. |
| [13] | Chen G G, Yi X T, Zhang Z Z, et al. Solving the multi-objective optimal power flow problem using the multi-objective firefly algorithm with a constraints-prior pareto-domination approach[J]. Energies, 2018, 11(12): 3438-3456. DOI:10.3390/en11123438 |
| [14] | Chen G, Wu T, Zhou Z. Research on ship meteorological route based on a-star algorithm[J]. Mathematical Problems in Engineering, 2021, 2021: 1-8. |
| [15] | Borhanazad H, Mekhilef S, Gounder G V, et al. Optimization of micro-grid system using MOPSO[J]. Renewable Energy, 2014, 71: 295-306. DOI:10.1016/j.renene.2014.05.006 |
