
 , 李凯, 樊星, 张凌越
, 李凯, 樊星, 张凌越 东北大学 机械工程与自动化学院, 辽宁 沈阳 110819
收稿日期:2021-07-16
基金项目:国家自然科学基金资助项目(51875092);宁夏回族自治区2020年度自然科学基金一般项目(2020AAC03279)。
作者简介:李小彭(1976-),男,江西宁都人,东北大学教授,博士生导师。
摘要:为解决双臂巡检机器人沿输电线行走过程中存在的行走轮受力不均, 易打滑脱线等问题, 提出一种移动关节主动调节方法.分别建立了传统的双臂巡检机器人、带柔索双臂巡检机器人和带移动关节双臂巡检机器人行走轮受力模型, 对比分析发现: 机器人在最佳位姿状态下, 受力情况最好, 不易发生打滑问题.建立了巡检机器人关节变化的动力学模型并设计主动控制器, 对机器人行走越障和沿线行走两种工况进行了仿真模拟.所设计的控制器能够协助机器人完成大坡度巡航与行走越障工作,并能够有效抑制关节振荡问题, 缩短响应时间.最后开展了机器人行走越障与不同坡度行走实验, 表明所设计的控制器能够辅助机器人完成巡检任务, 有效抑制了行走打滑问题.
关键词:双臂巡检机器人行走能力动力学模型关节调节位姿变化
Analysis on the Walking Ability of Dual-arm Inspection Robots Along Catenary Lines with Posture Changes
LI Xiao-peng
, LI Kai, FAN Xing, ZHANG Ling-yue School of Mechanical Engineering & Automation, Northeastern University, Shenyang 110819, China
Corresponding author: LI Xiao-peng, E-mail: xpli@me.neu.edu.cn.
Abstract: A dual-arm inspection robot walking along catenary lines has such problems as the uneven force of the robot's wheels and slipping on the lines, an active adjustment method of the moving joints is proposed to solve these problems. The force models of the robot walking wheels are established respectively, which are the traditional dual-arm inspection robot, the dual-arm inspection robot with flexible cables and the dual-arm inspection robot with moving joints. The comparative analysis shows that when the robot is in the best position and posture, the walking wheels have the best stress, and the robot is not likely to slip. The dynamic model of the inspection robot's joint changes is established and the joint controller is designed. Simulations are carried out on two working conditions of obstacle crossing and line walking. The designed controller can assist the robot to complete the tasks of obstacle crossing and large-slope cruise. The application of the controller can effectively handle the joint vibration problem and shorten the response time. Finally, experiments of robot walking over obstacles and walking on different slopes are carried out. The results show that the designed controller can assist the robot to complete the inspection task and handle the walking slip problem.
Key words: dual-arm inspection robotwalking abilitydynamics modelingjoint adjustmentposture change
随着机器人技术的发展, 为满足架空高压输电线的定期巡检需要, 输电线巡检机器人已成为****研究的重点.目前, 输电线巡检机器人结构主要分为双臂巡检机器人[1-3]、三臂巡检机器人[4-5]和三臂以上多臂巡检机器人[6-7].双臂巡检机器人相较于三臂与多臂, 具有结构简单、动作灵活、质量轻等优势, 但在沿线行走方面存在两行走臂受力不均, 从而引起打滑甚至行走轮脱线的现象.因此对双臂巡检机器人行走特性研究与优化问题受到了****的关注.
针对巡检机器人沿线行走问题, 大多采用机构调节、结构优化等方式.文献[8]通过柔索机构来改善巡检机器人的行走能力, 解决机器人的打滑问题, 但在大角度爬坡中存在局限.文献[9]通过夹紧机构设计结合模糊控制, 有效消除行走打滑现象.
在对机器人打滑控制方面, 一般为对机器人动力学模型研究和控制器设计.文献[10]建立了机器人打滑状态的运动学模型, 验证了打滑下轨迹跟踪的可控性和操作性.文献[11-13]依据机器人的动力学模型, 分别提出了一种基于广义扩展状态观测器的鲁棒跟踪控制器和基于扰动观测器的鲁棒跟踪控制器.文献[14]通过跟踪控制策略解决滑动与打滑问题.
本文针对双臂巡检机器人沿线行走打滑问题, 采用对移动关节的主动控制策略, 有效避免打滑.
1 机器人静力学受力模型分析双臂巡检机器人在执行巡航任务时, 由于高压输电线自重作用, 输电线路呈悬链线状, 如图 1所示.机器人沿线行走时, 机器人双臂受力不均会出现打滑甚至脱轨等问题.
图 1(Fig. 1)
 | 图 1 输电线轨迹示意图Fig.1 Schematic diagram of transmission line trajectory |
传统双臂巡检机器人行走臂垂直于机身, 如图 1中机器人1所示.将输电线近似看为直线, 其行走受力简图如图 2所示.
图 2(Fig. 2)
 | 图 2 传统双臂巡检机器人受力简图Fig.2 Force diagram of traditional dual-arm inspection robot |
根据图 2所示受力关系, 可得传统机器人沿线行走的受力模型如式(1)所示.
 | (1) |
 | (2) |
 | (3) |
对于行走轮OA来说, 受力大容易出现电机失效问题, 其局部受力分析如图 2所示.行走轮行走所需动力由电机提供, 当电机输出扭矩无法满足机器人行走需求时, 会出现失效现象.其临界条件为
 | (4) |
由式(2)~(4)可见, 为了避免打滑和脱轨问题发生, 需要将输电线对行走轮的作用力FA和FB控制在一定的范围内, 因此本文将主要关注行走轮受力分布问题.
针对机器人沿线行走打滑问题, 文献[8]提出了一种带柔索的双臂巡检机器人结构.带柔索双臂巡检机器人是在传统的巡检机器人基础上增加了肘关节和肩关节, 使得行走臂与机身之间能够具有一定的夹角.带柔索机器人行走的受力状况如图 3所示, 图中参数与图 2相同.
图 3(Fig. 3)
 | 图 3 带柔索双臂巡检机器人受力简图Fig.3 Force diagram of dual-arm inspection robot with flexible-cable |
根据图 3所示受力关系, 可得带柔索双臂巡检机器人沿线行走受力模型如式(5)所示.
 | (5) |
图 4(Fig. 4)
 | 图 4 机器人巡航工况行走轮受力分布图Fig.4 Distribution diagram of forces on wheels of the robot walking along the line (a)—传统巡检机器人;(b)—带柔索巡检机器人. |
图 4中, 显示了机器人巡航时出现打滑和脱轨问题.整体来看, 带柔索巡检机器人行走轮受力分布情况好于传统巡检机器人, 但仍存在红色失效区域, 不能完全解决巡检机器人巡航工况下的打滑脱轨问题.增加巡检机器人行走臂间距能够有效改善机器人受力情况, 对带柔索的巡检机器人来说, 当其行走臂间距大于0.7 m时, 基本可以避免打滑脱轨问题.但过大的机身与机器人轻量化设计相违背.
本文将采用移动关节主动调节机器人巡航位姿的方式, 如图 1中机器人2所示, 来解决打滑脱轨问题, 受力分析简图如图 5所示.
图 5(Fig. 5)
 | 图 5 带移动关节双臂巡检机器人受力简图Fig.5 Force diagram of dual-arm inspection robot with mobile joint |
根据图 5所示受力关系, 可得带移动关节机器人沿线行走受力模型如式(6)所示.
 | (6) |
图 6(Fig. 6)
 | 图 6 带移动关节巡检机器人行走轮受力曲线Fig.6 Curve of forces on wheels of dual-arm inspection robot with mobile joint |
当机身倾角保持α=0°时, 机器人可行走的轨道极限倾角如式(7)所示.由式(7)可见, 机器人保持最佳姿态行走时, 行走极限夹角只与摩擦系数有关.摩擦系数主要与输电线材料、表面锈迹程度、是否覆盖灰尘雨雪等因素有关, 也与行走轮材料、磨损程度等有关, 因此无法确定精确的摩擦系数.由此可见, 通过机器人关节调节以保证机器人的最佳运行姿态, 是避免打滑问题的关键.
 | (7) |
图 7(Fig. 7)
 | 图 7 带移动关节双臂巡检机器人Fig.7 Dual-arm inspection robot with mobile joint |
建立机器人沿线行走关节变化动力学模型如式(8)所示.
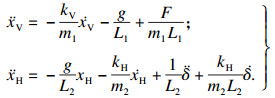 | (8) |



引入关节输出即系统输入u1, u2如式(9)所示.
 | (9) |
 | (10) |

3 关节控制器设计对于机器人系统, 期望为时间t→∞时, x→0.利用Lyapunov函数稳定性分析方法, 定义Lyapunov函数如式(11)所示.
 | (11) |
 | (12) |
此时, 系统的期望为时间t→∞时, x→0且e→0.定义新的Lyapunov函数如式(13)所示.
 | (13) |
 | (14) |
 | (15) |
同理, 定义系统Lyapunov函数如式(16)所示.
 | (16) |
 | (17) |
 | (18) |
4.1 行走越过压接管工况仿真分析巡检机器人沿线行走时, 需要行走越过压接管, 机器人行走越过压接管示意图如图 8所示.
图 8(Fig. 8)
 | 图 8 行走越过压接管示意图Fig.8 Diagram of walking over clamp |
对机器人行走越过压接管工况仿真分析, 以行走方向为x轴正方向, 以竖直向上为y轴正方向, 以越障前关节位姿为初始状态, 建立仿真坐标系, 可得时域响应曲线如图 9所示.与文献[15]所示全状态变量反馈控制策略对比, 观察关节控制效果.
图 9(Fig. 9)
 | 图 9 行走越过压接管工况时域响应对比Fig.9 Time domain response comparison of walking over clamp (a)—关节4位移; (b)—关节4速度; (c)—关节4加速度; (d)—关节6位移; (e)—关节6速度; (f)—关节6加速度. |
由竖直关节4的位移时域响应对比图可见, 文中所设计控制器能够满足巡检机器人行走越障需求, 与反馈调节方法对比, 能有效抑制关节振荡问题, 并在响应时间方面有很大的提升.
由竖直关节4的速度和加速度时域响应对比图可见, 自适应控制策略效果显著, 能够将竖直关节速度控制在±2 mm/s以内, 加速度控制在±5 mm/s2以内.在对水平关节的控制效果上, 能够将水平关节速度控制在±1.3 mm/s以内, 加速度控制在±4 mm/s2.
总体来看, 本文所设计的自适应控制器能够满足巡检机器人行走越障工况需求, 在关节允许的范围内, 提高了关节响应速度, 有较好的稳定性和精度.
4.2 沿线行走工况仿真分析巡检机器人沿线行走时, 输电线为悬链状.悬链线的斜抛物线方程如式(19)所示.
 | (19) |
地线比载主要由本身质量造成, 计算公式如式(20)所示.
 | (20) |
本文所研究地线型号为2×LGJ-400/35,年平均运行张力为24.676 kN, 截面积为425.24 mm2, 直径为26.82 mm, 线密度为1.350 kg/m. 以行走方向为x轴正方向, 竖直向上为y轴正方向, 地线一端为坐标原点, 建立仿真坐标系, 仿真得时域响应对比图如图 10所示.
图 10(Fig. 10)
 | 图 10 行走工况时域响应对比Fig.10 Time domain response comparison of walking conditions (a)—关节位移; (b)—关节4速度; (c)—关节4加速度; (d)—关节6速度; (e)—关节6加速度. |
从关节位移变化整体上看, 自适应控制方法能够满足巡检机器人沿线行走的工作需求, 响应迅速, 稳定性好.从放大图可以看到, 自适应控制器可以有效减少关节振荡和稳定误差问题, 适合巡检机器人巡航工作使用.从关节速度和加速度时域响应图可见, 关节响应时间控制在2 s以内, 并且控制效果明显, 速度和加速度变化十分平稳, 竖直关节加速度控制在0~1 mm/s2以内, 水平关节加速度控制在0~0.65 mm/s2以内.
针对大坡度地线情况, 以地线两端高度差10 m为例, 对机器人沿线行走情况进行仿真, 建立与图 10相同仿真坐标系, 得时域响应对比图如图 11所示.从整体来看, 自适应控制方法能够满足机器人在大坡度地线行走的需求, 有效解决关节振荡问题.关节速度变化平缓, 能够保证机器人平稳运行完成巡航任务.关节响应迅速, 竖直关节加速度能够控制在0~0.3 mm/s2以内, 水平关节加速度能够控制在0~0.1 mm/s2以内, 控制效果良好.
图 11(Fig. 11)
 | 图 11 大坡度行走工况时域响应对比Fig.11 Time domain response comparison of large-slope walking conditions (a)—关节位移; (b)—关节4速度; (c)—关节4加速度; (d)—关节6速度; (e)—关节6加速度. |
从爬坡效果上看, 控制器的设计能够满足机器人的爬坡需求, 可以解决由机器人本身带来的对地线坡度增大的问题.由式(7)的分析, 该方案的极限能力只与摩擦系数有关, 具体数值应依据机器人工作环境等实际情况决定, 很难通过实验仿真等手段获得准确的极限能力.
5 实验验证本文以现有巡检机器人为研究对象, 对机器人开展行走越过压接管工况实验, 通过摄像头的实时反馈信息观察机器人越障能力, 如图 12所示.整个实验平台主要分为计算机、控制线路、机器人和输电线四部分.计算机通过控制线路中的控制器和电机驱动实现对机器人关节的控制, 以保证机器人运行处于最佳位姿.机器人上的摄像头将输电线的实时情况传输给计算机, 工作人员通过观察计算机上的实时录像进行对输电线的巡检工作.
图 12(Fig. 12)
 | 图 12 机器人越障实验Fig.12 Robot crossing obstacle test |
控制流程图如图 13所示.计算机将控制信号传输给控制器, 控制器将控制信号转化为电信号, 传输给电机驱动器, 电机驱动器通过线路控制电机运动, 实现控制效果.
图 13(Fig. 13)
 | 图 13 控制流程图Fig.13 Control flow chart |
实验结果如图 14所示, 可见关节6在越障的开始阶段存在一定的瞬时过载, 关节能够主动调节机器人, 使得机器人能够平稳运行完成越障任务.越障过程中机器人运动平稳, 且实验结果与仿真结果基本吻合, 关节控制器的设计能够有效辅助机器人实现平稳越障.
图 14(Fig. 14)
 | 图 14 关节输出位移结果Fig.14 Results of output displacement of joint |
越障过程中分别截取机器人刚接触压接管、行走在压接管上和机器人越过压接管三个阶段的实时图片如图 15所示, 可见, 每个阶段所拍摄的压接管和输电线图片清晰, 满足巡检需求.
图 15(Fig. 15)
 | 图 15 越障过程Fig.15 Obstacle crossing process (a)—开始;(b)—中间;(c)—结束. |
将输电线坡度依次从-40°调整到40°, 间隔5°, 模仿机器人的行走下坡与上坡工况.控制机器人行走距离为10 m, 行走轮采用速度伺服控制, 在行走过程中速度设置为1 m/s, 分别记录每种坡度情况下机器人的行走时间, 实验数据如图 16所示.在机器人行走下坡时, 打滑会使机器人的行走时间缩短, 关节调节下的机器人行走时间大于传统姿态行走时间, 更接近于10 s; 行走上坡阶段, 打滑会增加机器人的行走时间, 关节调节下的机器人行走时间小于传统姿态行走时间, 更接近于10 s.可见本文提出的关节调节方法能够抑制打滑问题, 提高行走效率.
图 16(Fig. 16)
 | 图 16 机器人行走实验结果图Fig.16 Graph of robot walking experiment result |
6 结论1) 建立了3种双臂巡检机器人沿线行走受力模型, 并对机器人打滑机理进行研究, 发现巡检机器人打滑问题主要来源于摩擦系数和行走轮受力关系, 可以通过机器人移动关节的调节优化机器人姿态, 抑制机器人打滑问题, 由于机器人位姿与行走轨迹有关, 机器人行走需要关节的实时调节.
2) 建立了关节变化的双臂巡检机器人动力学模型, 结合动力学模型设计关节调节控制器.该控制器能够实现关节对机器人的实时调节功能, 解决双臂巡检机器人行走打滑问题.
3) 以现有双臂巡检机器人为研究对象, 仿真分析机器人行走越障和沿不同坡度行走两种工况, 结果显示所设计的控制器能够抑制机器人行走打滑问题, 能够辅助机器人完成大坡度的巡航任务.所设计的控制器具有较快的响应速度和一定的抑振能力.
4) 通过机器人行走越障实验, 获得越障过程的实时图像, 图像清晰, 满足巡检需求; 通过不同坡度的机器人行走实验, 验证控制器对机器人打滑问题的抑制效果, 控制器的设计能够辅助巡检机器人完成巡检任务并能够有效抑制机器人打滑问题.
参考文献
| [1] | Morozovsky N, Bewley T. SkySweeper: a low DOF, dynamic high wire robot[C] // IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, 2013: 2339-2344. |
| [2] | 李小彭, 尚东阳, 李凡杰, 等. 输电线巡检机器人位姿变化的柔性关节控制策略[J]. 东北大学学报(自然科学版), 2020, 41(11): 1577-1583. (Li Xiao-peng, Shang Dong-yang, Li Fan-jie, et al. Flexible joint control strategy based on posture change of transmission line inspection robots[J]. Journal of Northeastern University(Natural Science), 2020, 41(11): 1577-1583. DOI:10.12068/j.issn.1005-3026.2020.11.009) |
| [3] | Wang H G, Jiang Y, Liu A H, et al. Research of power transmission line maintenance robots in SIACAS[C]// Proceedings of International Conference on Applied Robotics for the Power Industry(CARPI). Montreal, 2010: 1-7. |
| [4] | Yang D, Feng Z, Ren X, et al. A novel power line inspection robot with dual-parallelogram architecture and its vibration suppression control[J]. Advanced Robotics, 2014, 28(12): 807-819. DOI:10.1080/01691864.2014.884936 |
| [5] | Liang Q K, Wang Y N, Zhang D. Multifunctional robotic system for live power transmission lines[J]. Advanced Robotics, 2014, 28(12): 807-819. DOI:10.1080/01691864.2014.884936 |
| [6] | Guo R, Zhang F, Cao L. A mobile robot prototype for inspection of overhead bundled conductors[C]// The 2nd International Conference on Applied Robotics for the Power Industry. Zurich, 2012: 132-135. |
| [7] | Goncalves R S, Carvalho J C M. A mobile robot to be applied in high-voltage power lines[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2015, 37(1): 349-359. DOI:10.1007/s40430-014-0152-0 |
| [8] | 魏永乐, 房立金. 双臂巡检机器人沿输电线路行走特性研究[J]. 北京理工大学学报, 2019, 39(8): 813-818. (Wei Yong-le, Fang Li-jin. Research on dual-arms inspection robots walking along transmission line[J]. Transactions of Beijing Institute of Technology, 2019, 39(8): 813-818.) |
| [9] | 徐显金, 吴功平, 郑拓, 等. 高压巡检机器人行走轮打滑识别与模糊控制[J]. 武汉大学学报(工学版), 2015, 48(5): 717-722. (Xu Xian-jin, Wu Gong-ping, Zheng Tuo, et al. Slippage identification and fuzzy control for driving wheels of inspection robots along high-voltage transmission lines[J]. Engineering Journal of Wuhan University, 2015, 48(5): 717-712.) |
| [10] | Wang D, Low C B. Modeling and analysis of skidding and slipping in wheeled mobile robots: control design perspective[J]. IEEE Transactions on Robotics, 2008, 24(3): 676-687. DOI:10.1109/TRO.2008.921563 |
| [11] | Li S H, Yang J, Chen W H, et al. Generalized extended state observer based control for systems with mismatched uncertainties[J]. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4792-4802. DOI:10.1109/TIE.2011.2182011 |
| [12] | Kang H S, Kim Y T, Hyun C H, et al. Generalized extended state observer approach robust tracking control for wheeled mobile robot with skidding and slipping[J]. International Journal of Advanced Robotics Systems, 2013, 10(3): 155-164. DOI:10.5772/55738 |
| [13] | Chen M. Disturbance attenuation tracking control for wheeled mobile robots with skidding and slipping[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3359-3368. DOI:10.1109/TIE.2016.2613839 |
| [14] | 王立玲, 董力元, 马东, 等. 滑动与打滑条件下的轮式移动机器人自抗扰跟踪控制[J]. 控制理论与应用, 2020, 37(2): 431-438. (Wang Li-ling, Dong Li-yuan, Ma Dong, et al. Active disturbance rejection tracking control of wheeled mobile robots under sliding and slipping conditions[J]. Control Theory & Applications, 2020, 37(2): 431-438.) |
| [15] | Busada C A, Jorge S G, Solsona J A. Full-state feedback equivalent controller for active damping in LCL-filtered grid-connected inverters using a reduced number of sensors[J]. IEEE Transactions on Industrial Electronics, 2015, 62(10): 5993-6002. DOI:10.1109/TIE.2015.2424391 |
