该文章由清华大学自动化系及土木工程系的研究人员共同完成。清华大学土木系助理研究员李深和自动化系教授李力为论文的通讯作者,李力教授指导的博士生常成为论文的第一作者,其他共同作者包括清华大学自动化系博士后张坤鹏及李力教授指导的博士生张嘉玮。文章系统地研究了如何利用边缘计算来监控网联自动驾驶车(connected and automated vehicles,CAV)的运动,并对潜在事故(如车道偏离、碰撞等)进行预警。与仅利用单车感知的数据相比,车路协同系统通过车与万物(vehicle-to-everything,V2X)的互联互通,直接收集网联自动驾驶车的运动数据,从而更容易综合计算每辆车的风险,产生更加优越的性能。

图1.ITSC最佳学生论文奖
驾驶安全是交通领域和车辆领域研究的一个重要问题。驾驶安全监控系统主要分为两类:车端系统和路侧系统。典型的车端高级驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)依赖于单车的感知数据,很难实现对交通场景的全面和准确的理解。典型的路侧摄像头系统监控的空间范围仍然十分有限,不足以支持较大时空范围内的高精度车辆运动预测。
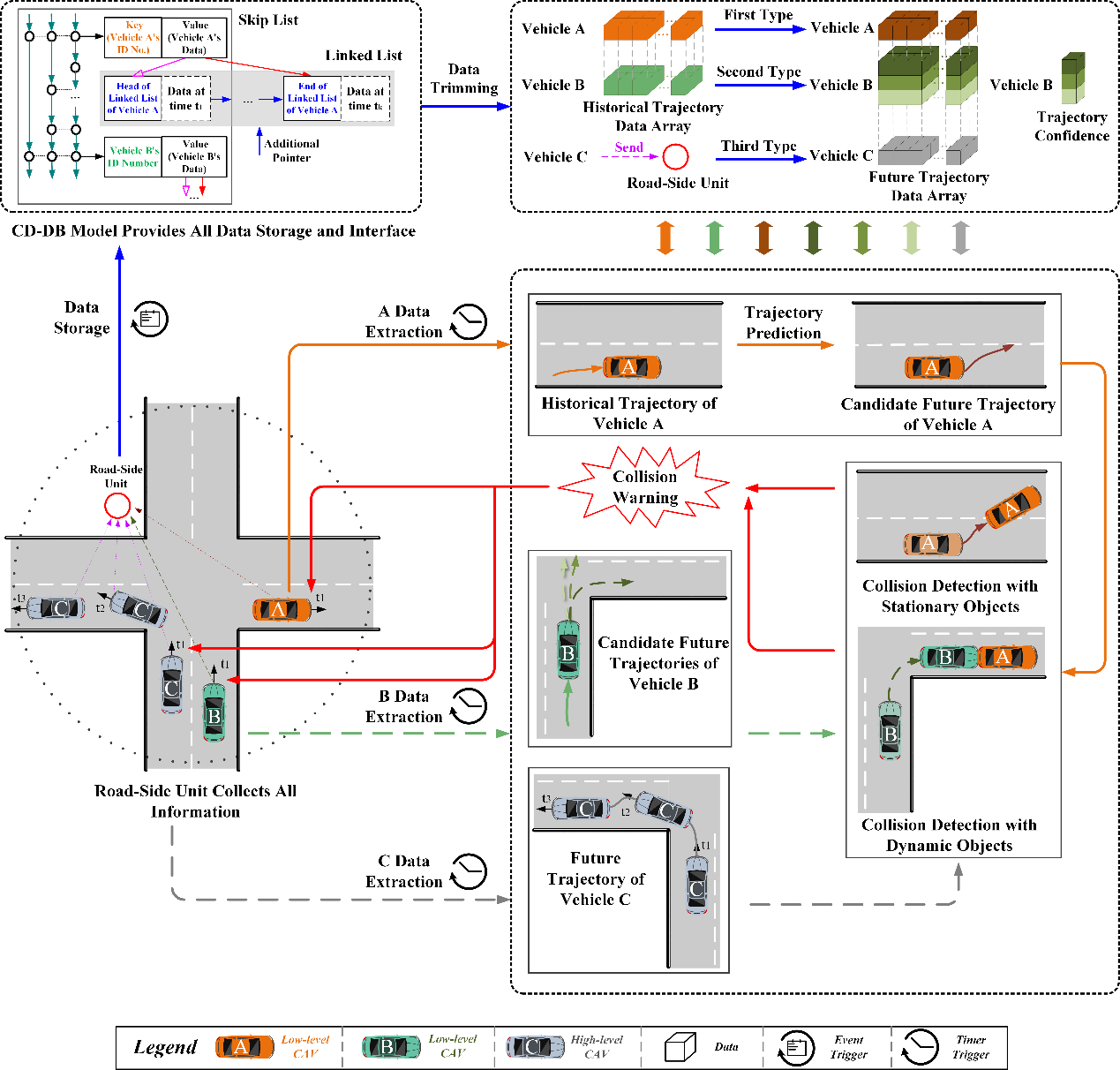
图2.论文提出的框架示意图
V2X通信技术的发展为我们解决驾驶安全监控及风险预警问题提供了新的基于协同驾驶和车路协同的思路。借助V2X通信技术,我们可以收集所监控道路的智能网联车辆数据,实施路侧单元边缘计算预警,其优势包括:系统仅需要收集车辆的位置和运动数据;系统的数据库可直接检索到驾驶环境数据,从而显著降低感知数据的计算成本,有效避免车辆遮挡、感知误差及识别失效等问题,以全面准确地获取场景中所有车辆的信息;系统可以积累海量的车辆历史轨迹数据用于运动预测和碰撞预警。
具体而言,文章提出了基于实时接收数据的快速判定碰撞及风险的算法和相应的数据结构模型,包含数据存储、轨迹预测、碰撞检测、风险预警等功能子模块。该框架允许我们考虑具有不同自动化等级的网联自动驾驶车,并研究网联自动驾驶车辆与人类驾驶车辆之间的交互作用。实验仿真结果表明了该方法的有效性,预警命中率显著优于基于单车感知数据的方法。文章还讨论了数据精度和传输时延对于预警预测和轨迹规划等应用性能的影响,确定了保证车辆驾驶安全的数据最低要求。这一研究为协同驾驶场景下自动驾驶的风险预警及规划控制等应用奠定了重要基础,推动了协同驾驶和车路系统的发展。
供稿:自动化系
编辑:李华山
审核:吕婷
2022年10月14日 10:13:05
