近日,微电子所微电子重点实验室刘明院士团队提出了基于忆阻器构建具备习惯化特性的人工感受神经系统的实现方案,并利用习惯化这一生物学习规则构建了可应用于机器人自主巡航避障的习惯化脉冲神经网络。
研究团队基于Mott忆阻器和传感器构建了感受神经元,该神经元能够感知外界的模拟信号并转化成实时的动态脉冲信号,实现了对外界信号进行感知并传输的基本功能。感受神经元进一步通过突触器件与中继神经元相连接构建了习惯化感知系统。该突触器件具有连续刺激下权值的习惯化演进趋势,进而影响感受神经元信号向中继神经元传输的效率,使中继神经元的输出呈现频率下降特性(即习惯化特性,如图a所示)。基于这一习惯化特性,团队进一步构建习惯化脉冲神经网络用于实现机器人避障功能。测试结果显示,基于习惯化的学习规则所构建的所示忆阻器基人工感受神经系统能够有效提升机器人的避障效率(如图b)。该习惯化感受神经系统还可通过不同的传感器应用于不同的感知系统,如嗅觉、味觉、视觉、听觉等。通过实现生物现实的感知系统,有望实现更具生物智能的终端系统。
 这一成果近期发表在《先进材料》期刊上(Advanced Materials,DOI: 10.1002/adma.202004398),微电子所博士研究生吴祖恒、卢吉凯为该文章的共同第一作者,微电子所研究员刘琦为该文章的通讯作者。
这一成果近期发表在《先进材料》期刊上(Advanced Materials,DOI: 10.1002/adma.202004398),微电子所博士研究生吴祖恒、卢吉凯为该文章的共同第一作者,微电子所研究员刘琦为该文章的通讯作者。该项目得到了科技部、国家自然科学基金委、中科院和之江实验室的项目资助。
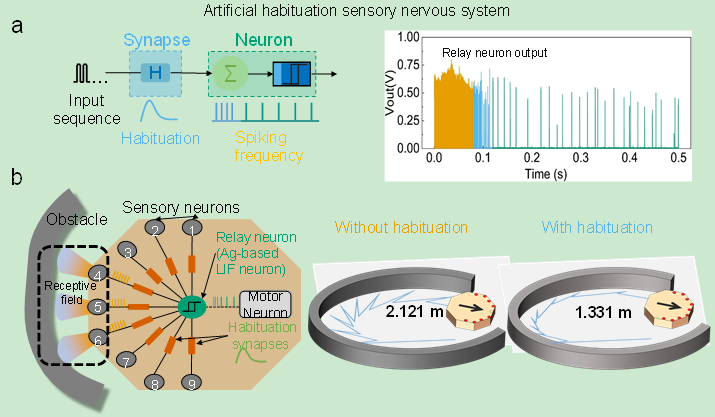
图a忆阻器基习惯化感受神经系统示意图及系统响应特性
图b忆阻器基习惯化脉冲神经网络在提升实现机器人避障效率上的验证
