
 , 禹卫东1
, 禹卫东11. 中国科学院电子学研究所, 北京 100190;
2. 中国科学院大学, 北京 100049
2015年01月07日 收稿; 2015年08月31日 收修改稿
通信作者: E-mail: songxiaoshen13@mails.ucas.ac.cn
摘要: VideoSAR是一种新的成像模式,使观测者在一段观测时间内,得到目标场景的图像序列,并以类似电影的方式再现场景信息.本文分别推导条带模式下,以无重叠和有重叠两种方式提取每帧数据时,帧率、分辨率和雷达工作频率的依赖关系式,为开发VideoSAR系统的参数设计提供参考.通过对静止和匀速运动点目标进行帧率为37.50 fps的VideoSAR模型仿真,验证了本文推导的正确性,以及条带式VideoSAR的可行性.
关键词: 合成孔径雷达(SAR)VideoSAR帧率条带式
Derivation and application of stripmap VideoSAR parameter relations
SONG Xiaoshen1,2
, YU Weidong1 1. Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China;
2. University of Chinese Academy of Sciences, Beijing 100049, China
Abstract: VideoSAR is a land imaging mode. By using VideoSAR, the radar data can be persistently collected on a target of interest,and then "movie-like" images can be created for an extended period of time. We derive the relation expression between frame rate limited by resolution and radar center frequency, and the VideoSAR images can be formed from both the non-overlapping and overlapping sub-apertures. This work provides a useful theoretic approach for designing the VideoSAR system. The theoretical results are validated through stationary target and moving target simulations at the frame rate of 37.50 fps.
Key words: synthetic aperture radar (SAR)VideoSARframe ratestripmap
近距空中支援系统,以美国AC-130为例,大多采用光学传感器对目标进行探测和跟踪[1].尽管光学传感器具有波长短、测角精度高等优点,但易受大气衰减、灰尘和强光的影响,探测距离有限,很难适应天气多变、硝烟四起的战场环境.相比于光学传感器,合成孔径雷达(synthetic aperture radar,SAR)具有全天时、全天候、分辨率高以及穿透能力强等特点,不受雾、雨、云等恶劣天气的影响,成为目前对地观测和军事侦察的重要手段[2-3].VideoSAR(video synthetic aperture radar)的概念于2003年由美国桑迪亚国家实验室(Sandia National Laboratories)的Lars Well等[4]首先提出,即以类似电影(movie-like)的方式再现场景信息,实现对机动目标的动态观测.此概念的提出,引起了遥感界的广泛关注[5-10].2012年,美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DARPA)提出,要开发一套完整的极高频(extremely high frequency,EHF)、全动视频(full-motion video)、高分辨率ViSAR(video synthetic aperture radar)系统,并于同年先后发布2份BAA(broad agency announcement)文件,向全球征询ViSAR系统的设计和开发理念[1, 5].显然,VideoSAR作为一种新的成像模式,一旦实现高分辨率、实时处理,就可以对敌方车辆、坦克、军舰等目标的地理位置、移动方向、移动路线甚至速度等进行全天候跟踪监视,及时掌握敌军的最新发展动态.
目前,国外很多****和机构都展开了对VideoSAR的研究,国内关于VideoSAR的开发尚处于起步阶段,如何实时获取高分辨率连续图像序列,成为主要研究热点[6].文献[1]基于圆迹SAR,间隔一定的雷达视线转角,生成多幅图像,通过对图像序列进行非相干叠加,以降低图像的相干斑,提高图像对比度.该方法主要应用于分析图像的静态特征,对于动态场景,作者并没有做出详细讨论.文献[6]对VideoSAR的每帧(frame)图像进行子孔径(sub-aperture)划分,综合考虑内存需求和旁瓣抑制,提出一种分段多项式孔径加权法,提高了每帧图像的方位分辨率.文献[8]提出一种自聚焦方法,无需考虑雷达平台的位置,通过对Pseudo point-scatterers进行相位梯度的估计,得到固定方向的良好聚焦VideoSAR图像.文献[9]引入子孔径循环移位思想以提高计算效率,使实时获取VideoSAR图像成为可能.此外,作为VideoSAR的应用之一,文献[10]将其得到的大量图像进行相干变化检测(coherent change detection,CCD),在不牺牲空间分辨率的前提下,引入时间平均,提高了图像的相干估计.
VideoSAR的成像模式主要分为3类:条带式、聚束式以及圆迹式.其中条带SAR的数据获取以及处理算法最为简单,但观测时间有限.聚束SAR在载机飞行过程中,天线波束始终指向目标点,观测时间较长.圆迹SAR作为一种特殊的聚束模式,采用圆周运动轨迹实现对目标的观测,在保证一定图像分辨率的同时,能够在聚束SAR的基础上,进一步扩展观测时间.当前,关于VideoSAR的研究主要基于聚束式或圆迹式[6-9],还没有基于条带式VideoSAR的研究,而且其工作重点主要集中在对产品的推广以及硬件实现上,对VideoSAR基本成像原理的介绍以及VideoSAR系统各参数指标之间的依赖关系并没有进行详细讨论.由于在实际中,聚束SAR和圆迹SAR对系统设计以及载机的飞行路径要求较高,实现起来较为复杂.相比之下,条带模式的雷达平台匀速扫过地面,天线指向保持不变,关于条带SAR的数据获取及后期处理的研究都更为成熟.因此,能否在传统的条带模式下实现VideoSAR的处理,对于VideoSAR基本原理的掌握以及后续研究都有一定的参考价值.本文基于条带SAR,详细阐述无重叠和有重叠2种提取帧数据方式,对图像分辨率以及帧率的影响,并通过仿真实验,成功实现了条带式VideSAR模型下,对静止目标以及运动目标的观测.
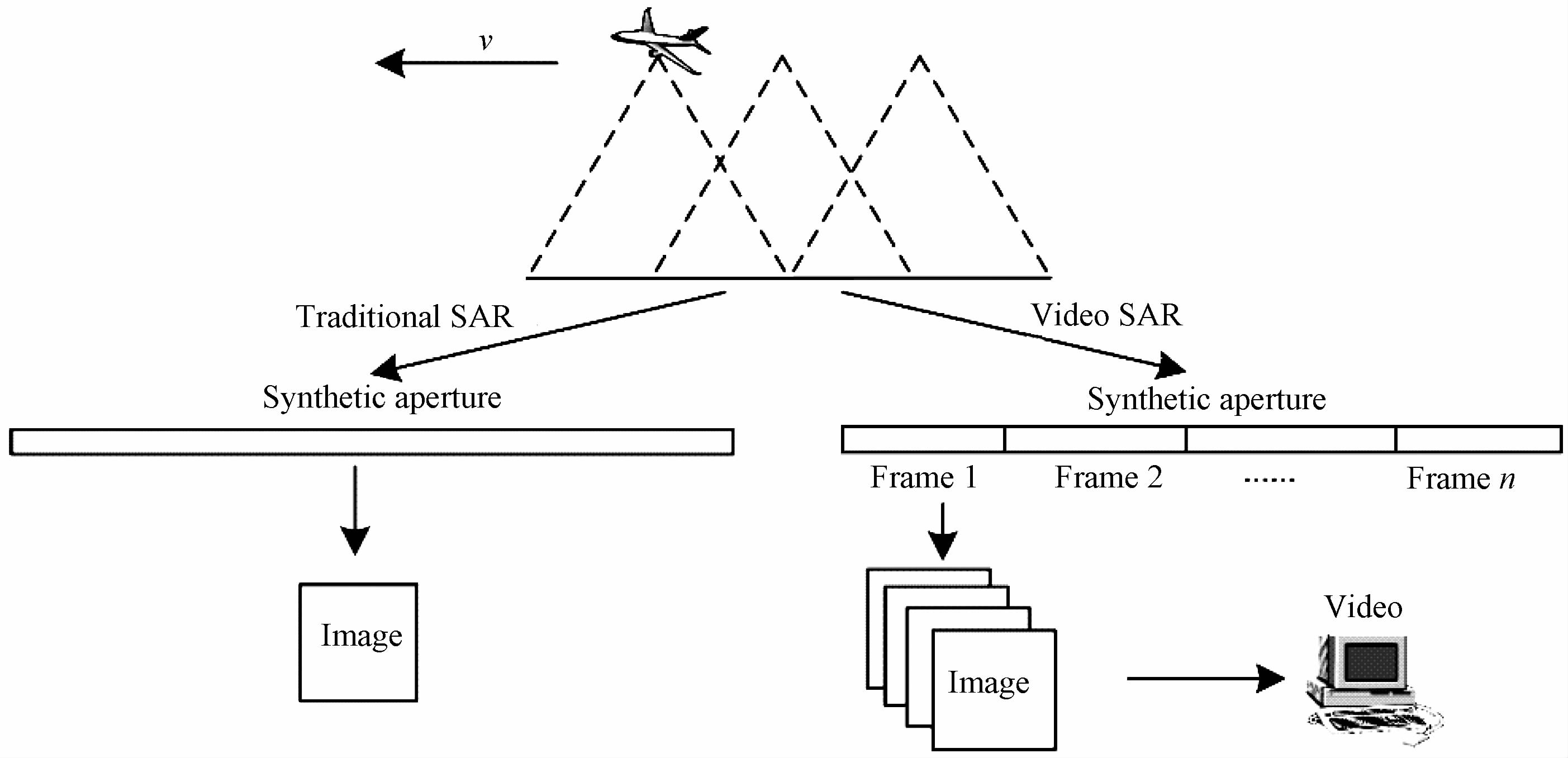
1 VideoSAR模型分析1.1 VideoSAR的基本原理传统SAR在合成孔径时间内,对观测场景进行单一成像,如图 1所示,而VideoSAR以一定方式对合成孔径时间内的数据进行切分(可重叠),对每一帧数据进行成像处理,从而获得观测场景的图像序列,并以视频方式再现场景信息.对于VideoSAR的性能评估主要包含3个方面[1]:图像分辨率(resolution)、帧率(frame rate)以及观测场景(field of regard)的大小.其中图像的距离向分辨率主要取决于发射脉冲的带宽,方位分辨率则主要取决于实际的帧数据提取方式,为此,可以考虑给定分辨率指标,分别以无重叠和有重叠2种方式,对合成孔径时间内的数据进行提取时,视频帧率将如何改变.
Fig. 1
 | Download: JPG larger image |
| 图 1 VideoSAR基本原理Fig. 1 The fundamentals of VideoSAR | |
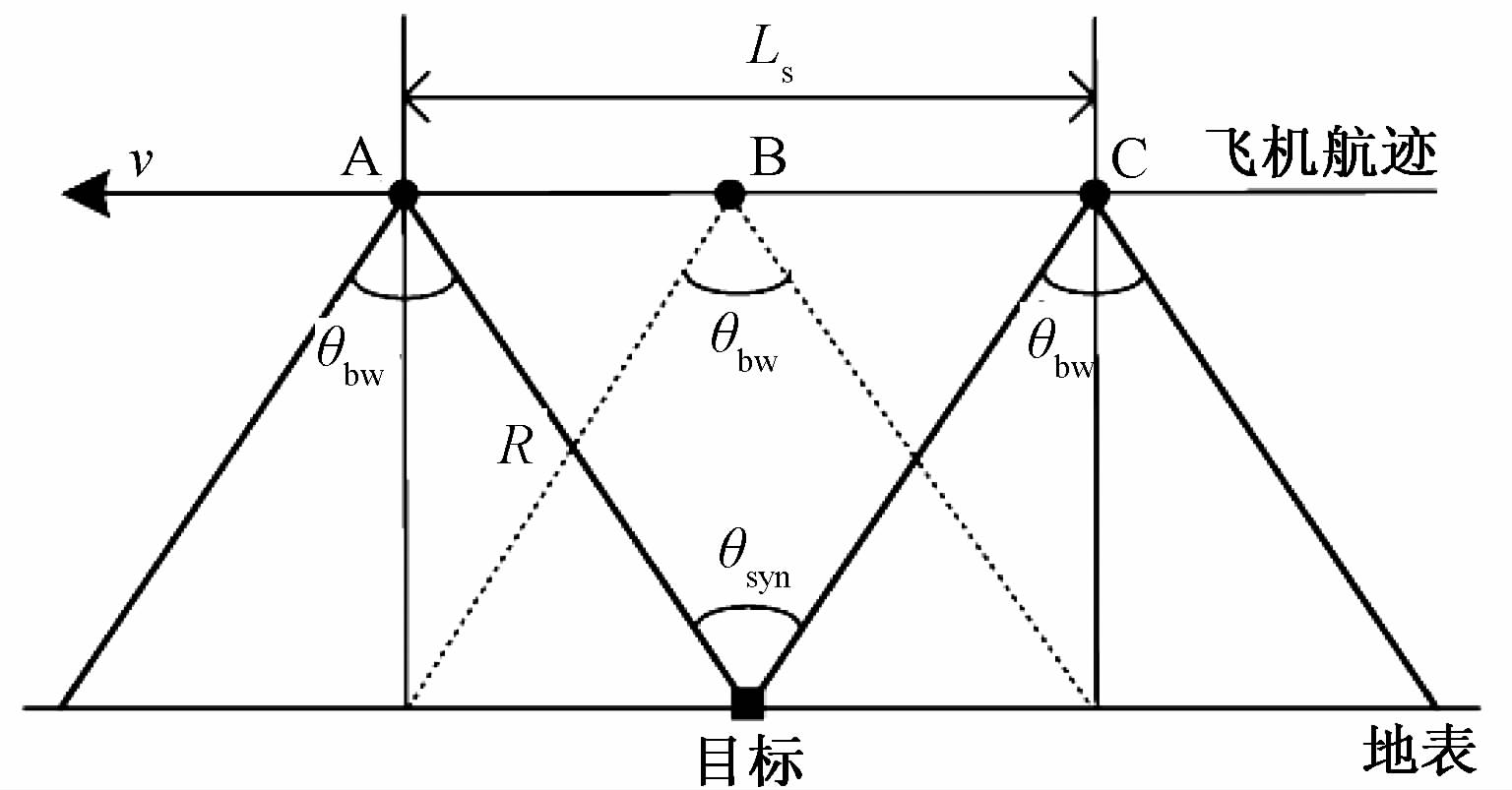
1.2 无重叠帧数据提取对帧率的影响分析图 2为机载SAR方位向波束宽度和合成角的空间几何模型.假定为正侧视,载机飞行速度为v,雷达工作频率为f0,天线方位向长度为La,波束宽度为θbw=0.886c/(f0La),合成角θsyn=θbw,雷达合成孔径长度为Ls,载机到目标的最近斜距为R,则方位向分辨率[2]为
| $~{{\rho }_{a}}=\frac{0.886c}{2{{f}_{0}}{{\theta }_{syn}}}{{\gamma }_{w,a}}.$ | (1) |
 | Download: JPG larger image |
| 图 2 天线方位向波束宽度θFig. 2 Antenna azimuth beamwidthθbwand synthetic angleθsyn | |
其中,γw,a为处理中加窗引入的IRW展宽因子.从空间几何关系图中,可以得到合成孔径长度为
| $~{{L}_{s}}\approx {{\theta }_{syn}}R.$ | (2) |
Fig. 3
 | Download: JPG larger image |
| 图 3 VideoSAR帧数据的无重叠提取Fig. 3 VideoSAR frames formed from non-overlapping sub-apertures | |
| $~F=\frac{v}{{{L}_{s}}}=K\frac{v{{\rho }_{a}}}{cR}{{f}_{0}},$ | (3) |
| $F\propto \frac{v{{\rho }_{a}}}{R}{{f}_{0}},$ | (4) |
由式(4)可知,对一定范围内的目标进行观测,需通过提高雷达工作频率,以实现较高帧率,从而保证视频画面的流畅性.此外,雷达工作频率的提高,会使合成孔径变短,进而减小机动目标的方位向散焦.
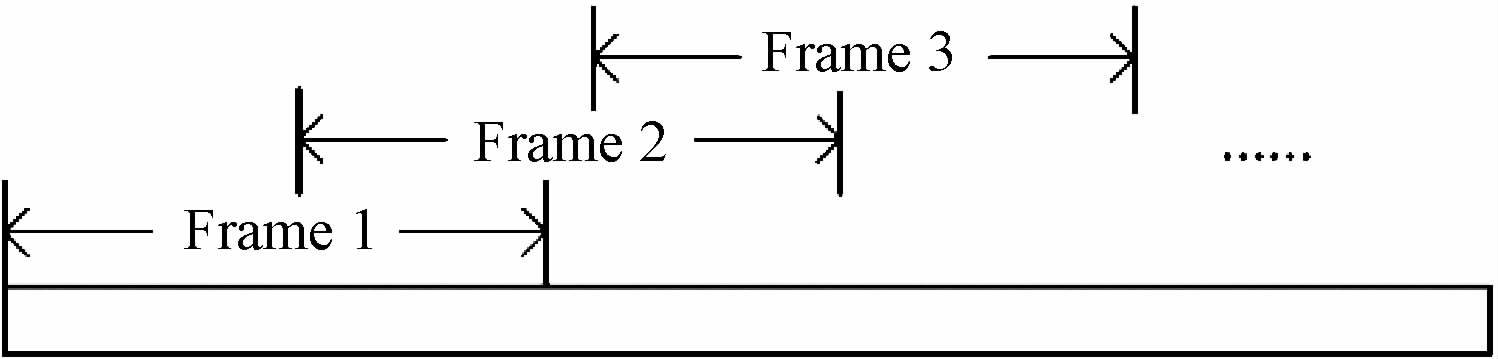
1.3 有重叠帧数据提取对帧率的影响分析在合成孔径内,无重叠提取每帧VideoSAR数据,要求雷达工作在较高频段,后文将会给出,雷达至少应工作在THz频段.为此,考虑到现有硬件技术的限制,我们以百分比为α的重叠率进行每帧数据的切分,如图 4所示.
Fig. 4
 | Download: JPG larger image |
| 图 4 VideoSAR帧数据的有重叠提取Fig. 4 VideoSAR frames formed from overlapping sub-apertures | |
假设每一帧VideoSAR数据对应的子孔径长度为L0(L0≤Ls),每帧数据间的重叠百分比为α,设此时的帧率为F',则由几何关系可推得
| $~F\prime \left( 1-\alpha \right){{L}_{0}}=v,\text{ }\alpha <1,$ | (5) |
| $F\prime =\frac{v}{{{L}_{0}}\left( 1-\alpha \right)},\text{ }\alpha <1,$ | (6) |
| $\rho {{\prime }_{a}}=\frac{0.886c}{2{{f}_{0}}\theta {{\prime }_{syn}}}{{\gamma }_{w,a}},$ | (7) |
| $~F\prime =K\frac{v\rho {{\prime }_{a}}}{cR\left( 1-\alpha \right)}{{f}_{0}},$ | (8) |
| $F\prime \propto \frac{v\rho {{\prime }_{a}}}{R\left( 1-\alpha \right)}{{f}_{0}}.$ | (9) |
| ${{v}_{r}}\frac{1}{F\prime }={{n}_{r}}{{\Delta }_{r}},$ | (10) |
| ${{v}_{a}}\frac{1}{F\prime }={{n}_{a}}{{\Delta }_{a}},$ | (11) |
| $~{{n}_{r}}=\frac{{{v}_{r}}{{L}_{0}}\left( 1-\alpha \right)}{v{{\Delta }_{r}}},\text{ }\alpha <1,$ | (12) |
| ${{n}_{a}}=\frac{{{v}_{a}}{{L}_{0}}\left( 1-\alpha \right)}{v{{\Delta }_{a}}},\text{ }\alpha <1.$ | (13) |
为了比较上文2种提取帧数据的方式,对视频帧率的影响,我们假定γw,a=1,天线方位向长度La=0.4 m,景中心斜距R=5 km,雷达有效速度v=65 m/s[9].依据式(3),本文对不同波段的视频帧率进行了计算,结果见表 1.由表中数据可以看出,以无重叠方式提取每帧数据时,为保证视频画面的流畅性,雷达应至少工作在THz波段.而有重叠提取方式下,由式(8)可知,VideoSAR系统可进一步通过增大每帧数据的重叠百分比来提高帧率.这里假设每帧数据对应的子孔径长度L0=20 m,帧之间的重叠百分比α=85%.由式(6)可得,此时视频帧率F'=21.67 fps,即在每帧图像对应的子孔径长度L0(L0<Ls)一定的前提下,雷达工作频率只决定了每帧图像的方位分辨率(依据式(7)),与视频帧率无关(依据式(6)),且持续相同的观测时间(受限于有效的合成孔径长度),有重叠提取时,VideoSAR系统可利用的有效合成孔径数据更多,可获得更多的方位向高分辨率图像序列.因此,本文主要基于有重叠帧数据提取法,并通过点目标仿真实验,以实现条带模式下的VideoSAR处理.
Table 1
| 表 1 不同波段无重叠帧数据提取方式下的帧率Table 1 Frame rates within different wavebands for non-overlapping sub-apertures |
关于每帧数据的成像处理,传统的频域算法,如RDA、CSA等[2]均可完成,本文采用的是后向投影(BP)算法[11].同其他频域串行处理算法相比,该算法具有其特殊的优点.BP算法是一种基于时域处理的并行成像算法,通过计算成像区域内每一点到天线平台的双程时间,将回波信号进行相干叠加,从而恢复出每个像素的目标函数.该算法可以在载机飞行的同时(方位向进行采样),连续地输出成像结果.随着合成孔径积累角的逐渐增大,输出图像的分辨率会逐渐变高,在内存中只需存储每个方位采样位置的回波数据.这些特点非常适合于VideoSAR的图像生成.这是因为VideoSAR每帧图像所对应的子孔径间会有较大比例的重叠区域,采用BP算法,系统只需要在内存中找到每帧图像对应的子孔径起始点,在与前一帧图像所对应的重叠区域回波数据累加结果的基础上,再叠加入起始点限定范围内的新的回波数据,即可得到新的一帧图像,这样就避免了重叠区域的重复计算,进而提高成像速率.此外,该算法本身非常适合于作并行处理,可方便地实现结构完全相同的并行处理模块,特别是近年来,随着GPU(graphical processing unit)并行技术的发展和进步,为使用 BP 算法实现实时大场景VideoSAR模型观测提供了可能.
由于BP算法已经是一种很成熟的SAR处理算法,具体到处理某一帧图像时,该算法在VideoSAR中的应用与在传统SAR中的应用并没有很大区别,这里不再赘述BP的具体算法流程,读者可参阅文献[11-13]了解该算法的具体实现步骤.
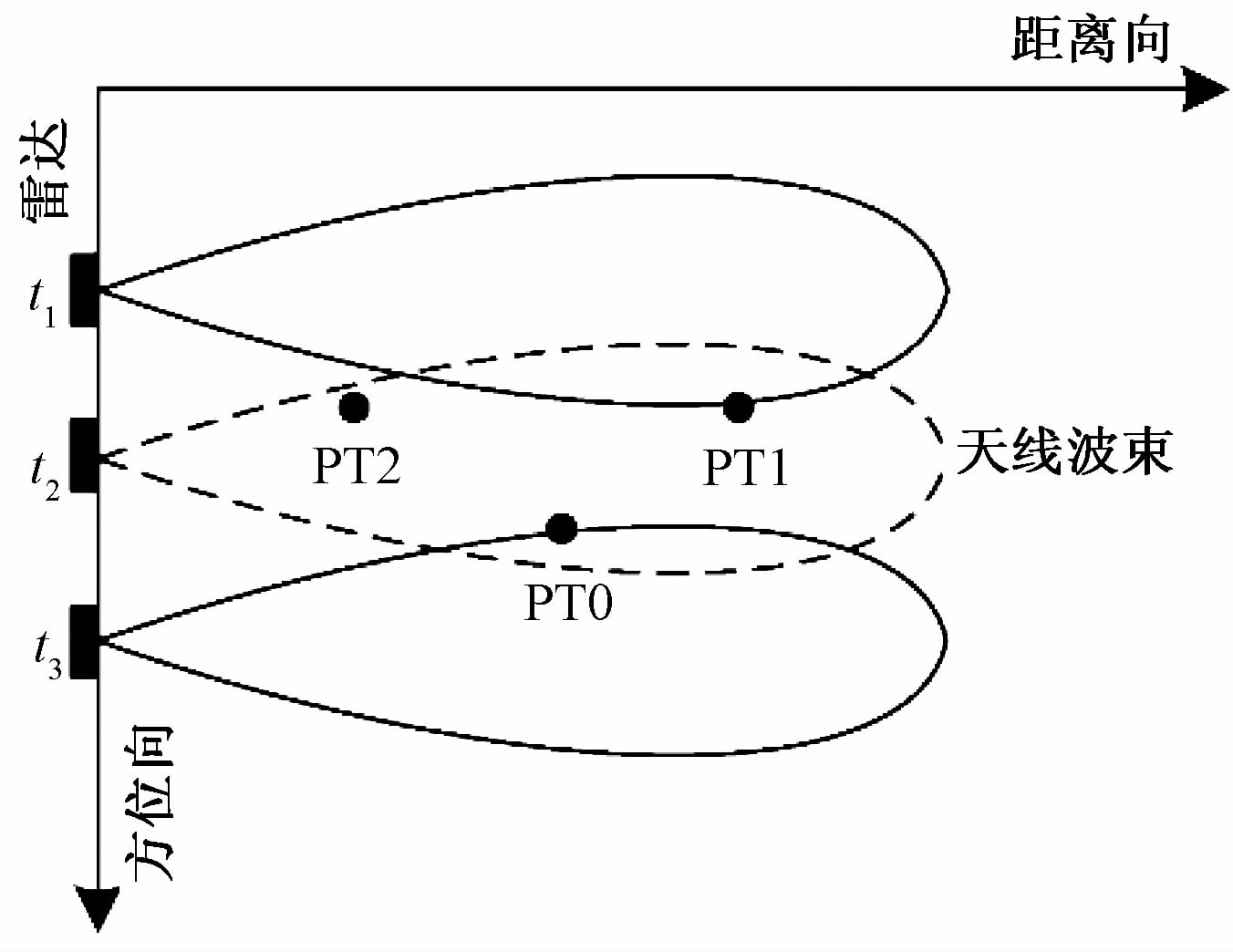
2 仿真实验与分析2.1 数据模型及仿真参数的设定场景设置如图 5所示,PT0为场景中心处点目标,由PT0向场景远端间隔40 m放置一个点目标PT1,由PT0向场景近端间隔40 m放置一个点目标PT2.其中PT0和PT1为静止点目标,PT2分别设成静止和匀速运动2种场景,具体参数值参见表 2.
Fig. 5
 | Download: JPG larger image |
| 图 5 仿真场景设置Fig. 5 Scene geometry for simulation | |
Table 2
| 表 2 VideoSAR仿真参数Table 2 Parameters for VideoSAR simulation |
2.2 点目标仿真实验依据以上分析,本文以精确回波延时公式生[LL]成回波[2],采用BP算法,对距离压缩后的数据,以有重叠方式提取每帧数据,分别对静态场景和存在匀速运动目标的场景进行VideoSAR仿真.由式(6)、式(12)和式(13)可以推得,此时每帧图像的距离向分辨率[2]ρr≈0.886c/(2|Kr|Tp)≈2 m,方位向分辨率ρ'a=0.64 m,帧率为37.50 fps,在静态场景下有效观测时间Te≈1.70 s.存在动目标时,观测时间可随方位向运动继续增加,每帧数据覆盖的场景大小(方位向×距离向)为34.67 m×375.00 m,运动目标在2帧间隔时间内跨过的分辨单元个数nr≈0.38,na≈4.43.此处,依据式(2),天线的方位向有效合成孔径Ls=110.75 m>L0,所以实际每帧图像的方位向分辨率ρ'[KG-*2]a(0.64 m)低于全孔径分辨率ρa(0.2 m).
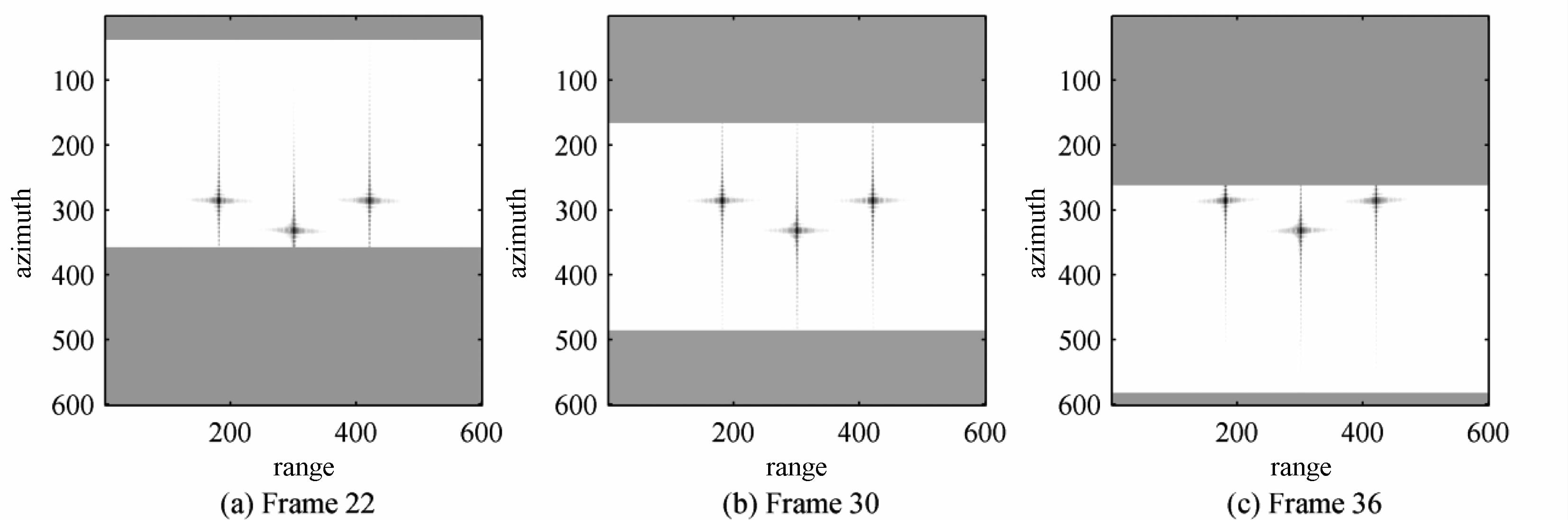
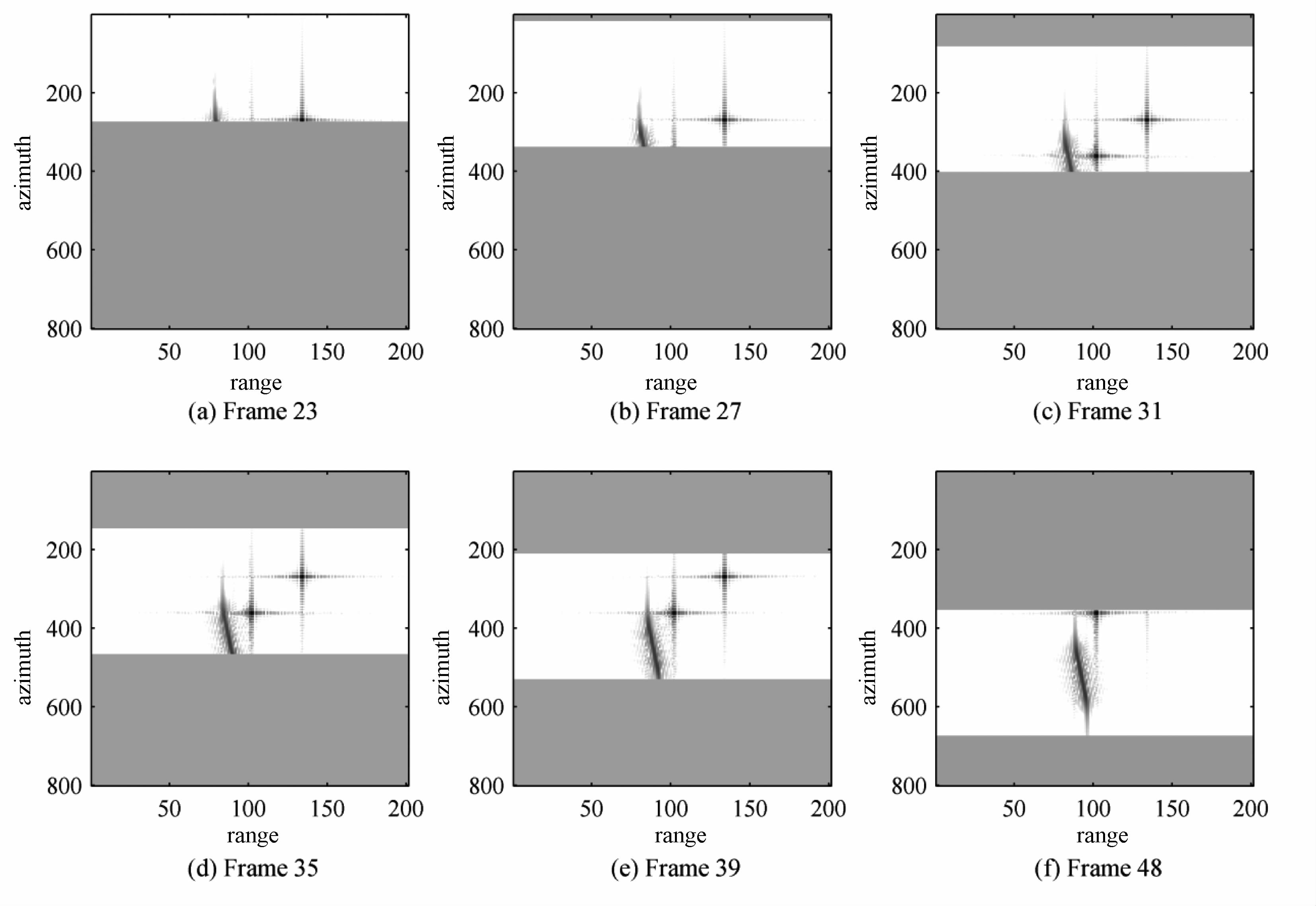
实验结果如图 6—图 8所示.图 6为3个静止点目标,图 7的PT0和PT1静止,PT2沿距离和方位向以速度(vr,va)做匀速直线运动.可以看出,在每帧图像的波束覆盖范围内(图 6、图 7的亮色区域),静止目标点得到了良好聚焦,运动目标在相应方向上发生了散焦,其中图 6的3个静止点在每帧图像中保持位置不变,图 7中PT2相对于静止点PT0和PT1,发生自左上向右下的运动,体现了目标的运动信息.
Fig. 6
 | Download: JPG larger image |
| 图 6 静态点目标场景VideoSAR仿真Fig. 6 VideoSAR simulations for stationary point targets | |
Fig. 7
 | Download: JPG larger image |
| 图 7 动态点目标场景VideoSAR仿真Fig. 7 VideoSAR simulations for moving point targets | |
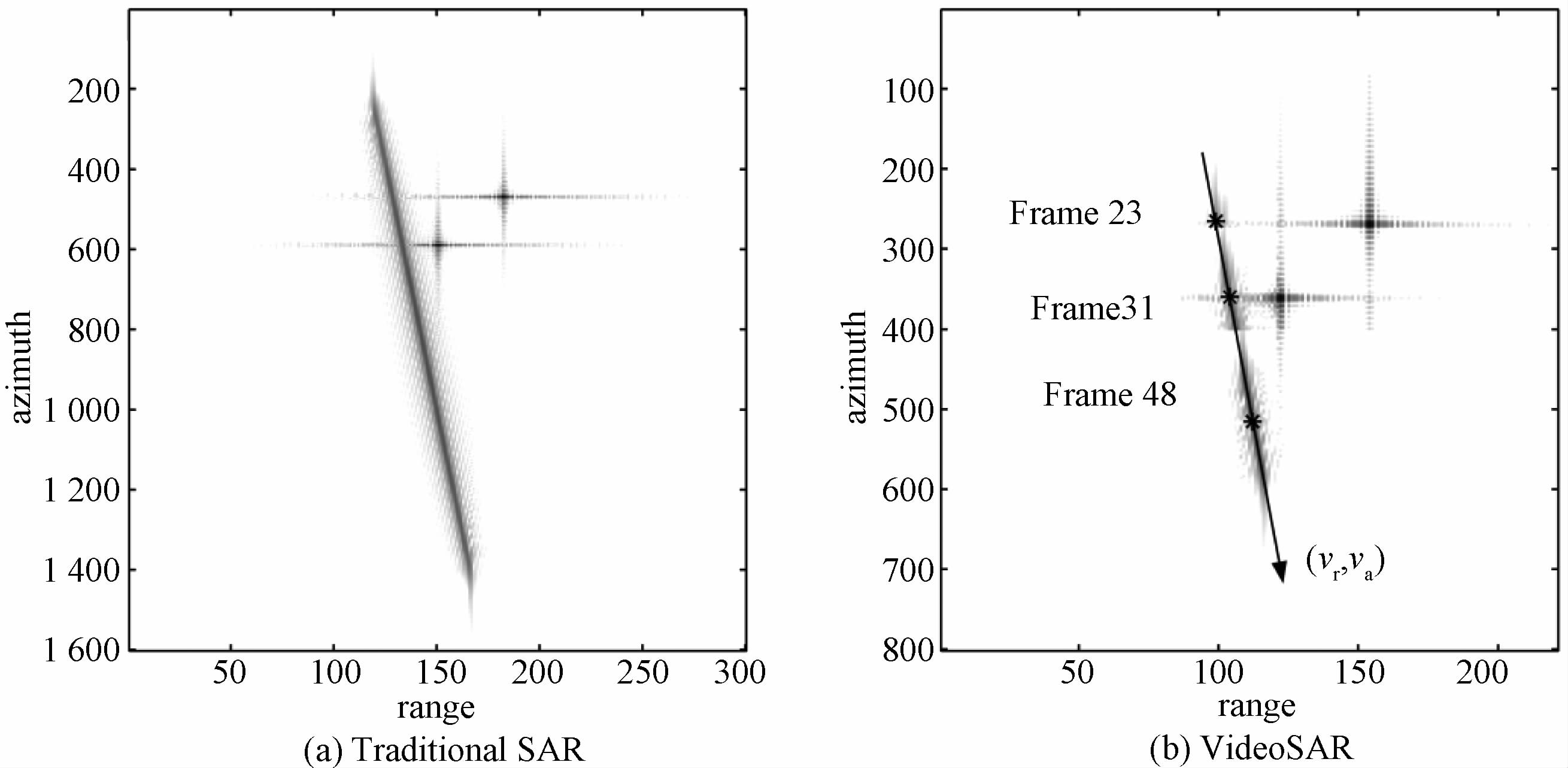
图 8对传统SAR和VideoSAR做了对比,其中图 8(a)是传统SAR体制下,对合成孔径内的有效数据进行成像,图 8(b)将第23、31和48帧图像叠加,从对比图中可以看出,相比于对观测场景进行单一成像的传统SAR体制,VideoSAR以视频方式对场景信息进行实时再现,在视频中可以明显观测到运动目标的变化情况(如PT2),使运动目标的识别及其地理位置的实时监测变得更加容易.
Fig. 8
 | Download: JPG larger image |
| 图 8 传统SAR和VideoSAR的对比Fig. 8 Comparison between traditional SAR and VideoSAR | |
3 结语本文分别在有重叠提取帧数据和无重叠提取帧数据2类模式下,推导了条带式VideoSAR帧率、分辨率和雷达工作频率的依赖关系式,为VideoSAR的系统参数设计提供了参考,并采用BP算法,通过对静止和运动点目标进行仿真实验,验证了本文所述条带式VideoSAR的正确性和可行性.
VideoSAR对于战场侦察具有重要意义,目前国内关于VideoSAR的研究尚处于起步阶段,因此,考虑到现有硬件实现的复杂性,根据场景需求以及成像性能分析,开发多种成像模式,提高算法效率和图像质量,特别是对机动目标方位向散焦的处理,是我们下一步的主要研究方向.
参考文献
| [1] | ?Defense Advanced Research Projects Agency. Broad agency announcement: video synthetic aperture radar (ViSAR) system design and development [R/OL]. (2012-05-01)[2014-01-15]. https://www.fbo.gov/index?s=main&mode=list&tab=list. |
| [2] | Cumming IG, Wong FH. Digital processing of synthetic aperture radar data: algorithms and implementation[M].London: Artech House, 2005: 3-215. |
| [3] | Riely B. Comparison of infrared and millimeter-wave imager performance in adverse weather conditions[R]. Army research lab adelphi md, 1997.http://cn.bing.com/academic/profile?id=185989860&encoded=0&v=paper_preview&mkt=zh-cn |
| [4] | Wells L, Sorensen K, Doerry A, et al, Developments in SAR and IFSAR systems and technologies at sandia national laboratories[C]//Proceedings of Aerospace Conference 2003. IEEE, 2003, 2: 1085-1095.http://cn.bing.com/academic/profile?id=2103718934&encoded=0&v=paper_preview&mkt=zh-cn |
| [5] | Defense Advanced Research Projects Agency. DARPA seeks technology to see through clouds for warfighter support [OL]. (2012-05-02)[2014-01-17].http://www.darpa.mil/Our_Work/STO/Programs/Video_Synthetic_Aperture_Radar_(ViSAR).aspx. |
| [6] | Hawley RW, Garber WL. Aperture weighting technique for video synthetic aperture radar[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2011: 805107. |
| [7] | Damini A, Balaji B, Parry C, et al. A videoSAR mode for the X-band wideband experimental airborne radar[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2010: 76990E. |
| [8] | Linnehan R, Miller J, Bishop E, et al. An autofocus technique for video-SAR[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2013: 874608. |
| [9] | Miller J, Bishop E, Doerry A. An application of backprojection for video SAR image formation exploiting a subaperature circular shift register[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2013: 874609. |
| [10] | Damini A, Mantle V, Davidson G. A new approach to coherent change detection in VideoSAR imagery using stack averaged coherence[C]//Radar Conference (RADAR), 2013 IEEE. IEEE, 2013: 1-5.http://link.springer.com/chapter/10.1007%2F978-3-662-49155-3_47 |
| [11] | Soumekh M. Synthetic aperture radar signal processing[M].New York: Wiley, 1999. |
| [12] | Carrara WG, Goodman RS, Majewski RM. Spotlight synthetic aperture radar: signal processing algorithms[M].Norwood: MA: Artech House, 1995. |
| [13] | Gorham LA and Moore LJ, SAR image formation toolbox for MATLAB[C]//SPIE Defense, Security, and Sensing 2010. 2010: 769906. |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}