
式中,vci(k),vci(0),ωi(k)和ωi(0)均为广义速率的函数;vci(k)称为刚体i质心的第k偏速度;ωi(k)称为刚体i的第k偏角速度.对于具有N个刚体和f个自由度的多刚体系统,Kane方程在惯性参考系里的表达式为[14]

式中,
 k和k*分别为uk所对应的广义主动力和广义惯性力.且有
k和k*分别为uk所对应的广义主动力和广义惯性力.且有
式中,Fi和Mi分别为作用在刚体i上的主动力的主矢和相对质心的主矩;Fi*和Mi*分别为刚体i的惯性力主矢和相对质心的主矩,可以用以下公式求出:

式中,Ji为刚体i的惯量张量;aci为刚体i质心的加速度.2 物理模型假设飞行器由5个独立刚体组成(见图 1):机身、左翼内侧、左翼外侧、右翼内侧以及右翼外侧,质量分别为mb,m1,m2,m1,m2,总质量为mt.机身简化为一个均质柱体1,半径为R,长度为l,质心为Cb.每个机翼简化为两个均质细杆的组合:左侧机翼为杆2与杆3的组合,其中杆2以A为轴相对机身进行转动,杆3沿杆长方向相对于杆2做直线伸缩运动;右侧机翼为杆4与杆5的组合.设机翼内侧杆的长度为l1,机翼外侧杆的长度为l2.左、右机翼后掠角分别为θ1,θ2;左、右机翼的外侧相对内侧的伸出长度分别为Δ1,Δ2.设机翼简化后的杆与机身的对称轴位于同一平面内,亦为机身的纵向惯量主轴平面.
 |
| 图 1 飞行器简化模型Fig. 1 Morphing aircraft’s simplified model |
| 图选项 |
假设地面坐标系Ogxgygzg为惯性系,zg轴垂直向下指向地心.机体坐标系Oxbybzb以A,B连线的中点O为原点,xb轴沿体1的中心惯量主轴指向机头,yb轴垂直于xb轴指向机身右方,zb轴按右手法则指向机体下方.3 变体飞行器动力学建模3.1 广义坐标与广义速率假设机翼相对于机身的变形运动可以通过变体控制机构进行有效控制,这样一个给定的变形过程可以用一组约束方程表示:

式中,x为机翼变形运动的状态向量,包括机翼的展长与后掠角的位置、速度以及加速度;xr为状态向量的给定值.约束方程(8)可以有效地表示变体飞行器机翼变形运动的相关自由度.给定约束方程(8),系统的独立自由度就可以取为机身空间运动的6个自由度.选取机身上O点在地面坐标系中的坐标x,y,z以及机体坐标系相对于地面坐标系的俯仰角θ、滚转角φ、偏航角ψ 6个变量作为系统的广义坐标.选取O点在地面坐标系中平移运动的速度V在xb,yb,zb轴上的分量u,v,w,以及机体坐标系相对于地面坐标系转动运动的角速度ω在xb,yb,zb轴上的分量p,q,r 6个变量作为系统的广义速率,即uk(k=1,2,…,6)分别为u,v,w,p,q,r.以机体坐标系为参考系求解各刚体相对于惯性系的质心速度Vci和转动角速度ωi.各刚体的质心加速度aci、绕质心的角加速度
 可直接由vci,ωi对时间求导得到.利用式(1)、式(2)可以得出各刚体的质心偏速度Vci(k)和偏角速度ωi(k).3.2 广义主动力与广义惯性力给定约束方程(8),可以把机翼与机身之间以及机翼内、外侧之间的相互作用力当作系统的约束力,在Kane方程中不显含系统的约束力.变体飞行器所受到的外部主动力包括重力、空气动力和发动机推力.本文建立的系统的自由度是机身的6个自由度,飞行器所受到的空气动力的作用完全可以简化到机身上,而不影响这些自由度运动的正确性,其他部分只受自身重力的作用.假设机身所受到的发动机推力T的偏置角为零,即推力只有xb轴上的分量T.机体1受到的主动力和主动力矩在Oxbybzb中的表达式为
可直接由vci,ωi对时间求导得到.利用式(1)、式(2)可以得出各刚体的质心偏速度Vci(k)和偏角速度ωi(k).3.2 广义主动力与广义惯性力给定约束方程(8),可以把机翼与机身之间以及机翼内、外侧之间的相互作用力当作系统的约束力,在Kane方程中不显含系统的约束力.变体飞行器所受到的外部主动力包括重力、空气动力和发动机推力.本文建立的系统的自由度是机身的6个自由度,飞行器所受到的空气动力的作用完全可以简化到机身上,而不影响这些自由度运动的正确性,其他部分只受自身重力的作用.假设机身所受到的发动机推力T的偏置角为零,即推力只有xb轴上的分量T.机体1受到的主动力和主动力矩在Oxbybzb中的表达式为
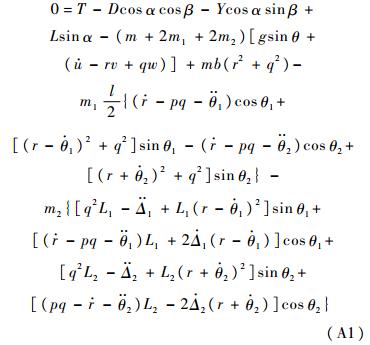
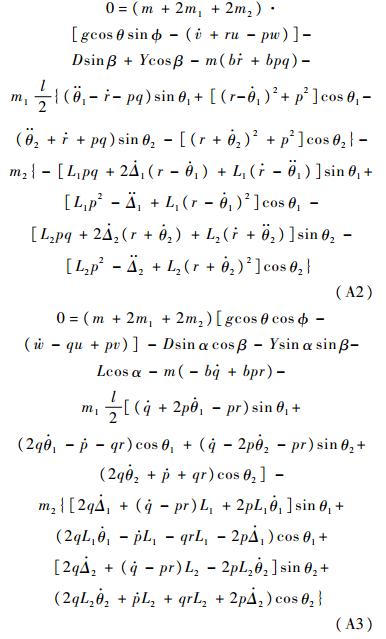
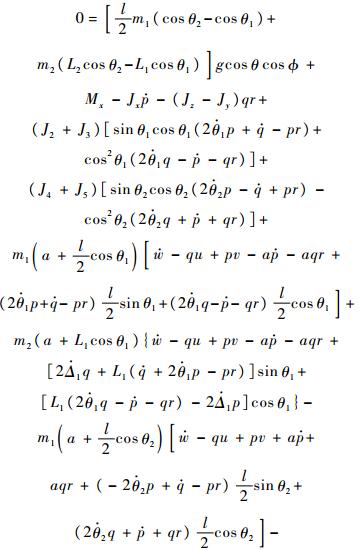
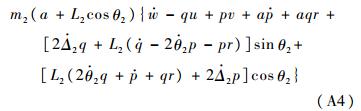
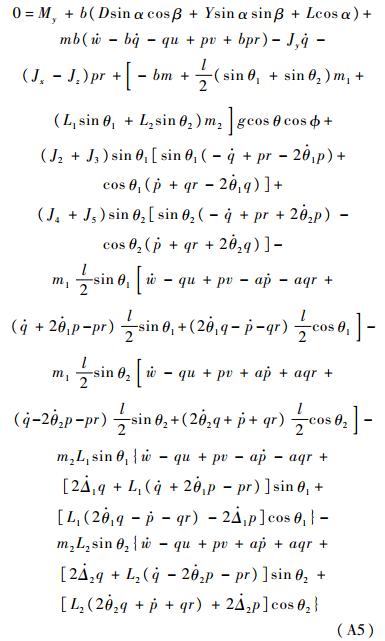
式中,D为阻力;Y为侧力;L为升力;Mx为滚转力矩;My为俯仰力矩;Mz为偏航力矩;α为攻角;β为侧滑角.系统中其余各刚体受到的主动力只有重力,主动力矩为零.广义主动力和广义惯性力分别由式(4)和式(5)计算得到.3.3 构造Kane方程根据式(3)可以得出飞行器的六自由度动力学模型,见附录A.其中,式(A1)~式(A3)为对应于广义速率u,v,w的力平衡方程,式(A4)~式(A6)为对应于广义速率p,q,r的力矩平衡方程.式(A1)、式(A3)、式(A4)为纵向动力学方程,式(A2)、式(A5)、式(A6)为横侧向动力学方程.4 变体过程动态特性仿真分析4.1 仿真平台及参数选用BQM-34“Firebee”无人靶机作为飞行器平台,机翼改为可变展长变后掠的可变形机翼.BQM-34机翼的重量为全机总重量的7%[15],考虑到变体机构对机翼重量的影响,取机翼的重量占全机总重量的15%,其中内侧机翼重量是外侧机翼重量的4倍.仿真参数见表 1.
表 1 基本仿真参数设置 Table 1 Parameters for simulation
| 参数 | 设置值 | 参数 | 设置值 |
| mt/kg | 907 | a/m | 0.355 |
| Ma | 0.5 | b/m | 0.15 |
| l/m | 6.985 | l1/m | 2.5 |
| R/m | 0.355 | l2/m | 2 |
表选项
采用的飞行器气动外形参数如下:机翼内侧与机翼外侧的根梢比均为1;在后掠角为零时,机翼内侧弦长为0.8 m,外侧弦长为0.7 m.基于准定常假设,采用Missile Datcom[16]软件分别计算变体飞行器在4种气动布局(见图 2)下的气动参数,在后续的仿真中采用线性插值的方法得到其他外形相应的气动数据.
 |
| 图 2 4种气动布局Fig. 2 Four aerodynamic configurations |
| 图选项 |
计算结果表明,飞行器在变形前后的气动系数变化较大,如在2°攻角下,从气动布局1变形到气动布局4,升力系数减小27.3%,因为在变形过程中,机翼的面积明显减小.4.2 变形运动产生的附加动力学影响分析可变展长、可变后掠角的飞行器进行变形运动时,除了所受空气动力会随气动外形的变化而改变外,还会产生源于变形运动的附加力和附加力矩的影响.附加力是指在力平衡方程中所有由变形运动引入的项(即含有

 或
或 的项,不包括空气动力)的和,其在xb,yb,zb轴上的分量分别记作ΔFx,ΔFy,ΔFz.附加力矩是指在飞行器的力矩平衡方程中所有由变形运动引入的项(不包括空气动力矩)的和,其在xb,yb,zb轴上的分量分别记作ΔMx,ΔMy,ΔMz.附加力与附加力矩就是变形运动引起的机翼的惯性力与惯性力矩,也是变体飞行器动力学方程与固定翼飞行器动力学方程的主要区别.下面通过两组仿真来分析机翼变形过程中产生的附加力和附加力矩的特性.假设在变形过程中,飞行器的速度和姿态保持不变.1) 假设机翼左右对称变形.第1步:从气动布局1变形到气动布局4,变形过程为一阶惯性环节,时间常数τ分别为1 s和15 s;第2步:进行反向变形.结果见图 3.
的项,不包括空气动力)的和,其在xb,yb,zb轴上的分量分别记作ΔFx,ΔFy,ΔFz.附加力矩是指在飞行器的力矩平衡方程中所有由变形运动引入的项(不包括空气动力矩)的和,其在xb,yb,zb轴上的分量分别记作ΔMx,ΔMy,ΔMz.附加力与附加力矩就是变形运动引起的机翼的惯性力与惯性力矩,也是变体飞行器动力学方程与固定翼飞行器动力学方程的主要区别.下面通过两组仿真来分析机翼变形过程中产生的附加力和附加力矩的特性.假设在变形过程中,飞行器的速度和姿态保持不变.1) 假设机翼左右对称变形.第1步:从气动布局1变形到气动布局4,变形过程为一阶惯性环节,时间常数τ分别为1 s和15 s;第2步:进行反向变形.结果见图 3. |
| 图 3 对称一阶变形附加力Fig. 3 Additional force under symmetric first-order morphing |
| 图选项 |
2) 假设只有右侧机翼变形.第1步:从气动布局1匀速变形到气动布局4,变形时间为1 s;第2步:进行反向变形.结果见图 4.
 |
| 图 4 单侧翼变形附加力及附加力矩Fig. 4 Additional forces and moment under asymmetric morphing |
| 图选项 |
由以上仿真结果可知,变形速度越快附加力就越大,τ为15 s时产生的附加影响基本可以忽略不计;对称变形只会产生附加力ΔFx,ΔFx相对于飞行器所受重力来说较小,最大仅为重力的3%,因为机翼的质量在整个飞行器中的比重较小,且变形的绝对速度不大;非对称变形还会对yb轴方向侧力以及绕zb轴偏航力矩产生附加影响,这会影响飞行器的横侧向稳定性.结合4.1节气动特性参数的计算以及文献[10]对变体飞行器非定常气动特性的分析可知,在变形过程中,飞行器所受空气动力的变化比所受附加力与附加力矩要大很多,前者对动力学特性的影响是最主要的,在变形速度不大时后者基本可以忽略.以上分析可为变体飞行器动力学模型的简化提供参考依据.4.3 变体引起的飞行器纵向运动响应分析假设飞行器的结构是面对称的,即θ1≡θ2,Δ1≡Δ2;飞行器进行无滚转无侧滑的飞行运动,即满足条件Φ=φ=β≡0,p=r≡0.对动力学模型进行解耦简化,得到飞行器的纵向动力学模型.对变体运动所引起的飞行器纵向运动响应进行仿真,变形过程为从气动布局1匀速变形到气动布局4,时间分别为1 s和15 s.初始条件是高度为10 km,0.5Ma的水平无侧滑稳态飞行.由图 5的仿真结果可知:当机翼开始变形,俯仰角速度变为负值,俯仰角逐渐变小,因为在机翼后掠的过程中,气动中心逐渐后移从而产生了低头力矩.变形开始后,飞行高度逐渐降低,飞行速度逐渐增加,因为随着机翼的后掠和收缩,机翼面积逐渐减小,进而升力变小,其在垂直方向上的分量不足以平衡重力,同时随着俯仰角的减小,发动机推力在垂直向上方向的分量减小,都会使飞行器获得向下的加速度.飞行器垂直机身向下速度分量的增加,会导致攻角逐渐增加.
 |
| 图 5 变体过程动态响应Fig. 5 Dynamic responses during morphing |
| 图选项 |
变形结束后,气动中心停止后移,在配平舵偏角的作用下,俯仰角速度逐渐回复到零及正值,俯仰角由减小逐渐变为增加;升力还是不足以平衡重力,所以高度继续下降.随着高度的下降,飞行速度以及攻角的增加,升力会逐渐增加,直至平衡甚至大于重力,使得飞行器上升,经过较长的振荡过程最终达到新的平衡状态.变形后,机翼面积减小会使升力变小,所以新的平衡状态下,飞行器的速度与攻角都会增大.对比两种变形速度可知:变形速度越大,飞行器状态变化越快,状态的变化量也越大;变形结束后,不同变形速度带来的影响会逐渐接近.以上分析表明:针对变体飞行器的动态特性及其模型与气动参数的不确定性,需要设计特定的鲁棒控制系统,以使其在变体过程中保持稳定.5 结 论1) 简化了可变展长、可变后掠角变体飞行器的物理模型,利用Kane方法建立了该种飞行器的动力学模型,可作为变体飞行器飞行控制系统设计与研究的基础.2) 机翼对称变形只会在xb轴方向产生附加动力学影响;非对称变形还会对yb轴方向以及偏航力矩产生附加影响;但以上附加影响相对于空气动力的变化来说较小,后者对变体过程的动力学影响是最主要的,该结果可用于动力学模型的简化.3) 对变体引起的飞行器纵向运动响应的仿真表明:飞行器的高度、速度以及俯仰角均发生很大变化;变形速度越大,飞行器状态的变化越快,其变化量也越大.附录A

式中,
 为杆3的质心与点A的距离;
为杆3的质心与点A的距离; 为杆5的质心与点B的距离.
为杆5的质心与点B的距离.参考文献
| [1] | Reich G,Sanders B.Introduction to morphing aircraft research[J].Journal of Aircraft,2007,44(4):1059. |
| Click to display the text | |
| [2] | Barbarino S,Bilgen O,Ajaj R M,et al.A review of morphing aircraft[J].Journal of Intelligent Material Systems and Structures,2011,22(9):823-877. |
| Click to display the text | |
| [3] | Weisshaar T A.Morphing aircraft technology-new shapes for aircraft design,RTO-MP-AVT-141[R].France:DTIC Document, 2006. |
| Click to display the text | |
| [4] | Bonnema K,Smith S.AFTI/F-111 mission adaptive wing flight research program[C]//4th Flight Test Conference.USA:AIAA,1988:155-161. |
| [5] | Pendleton E W,Bessette D,Field P B,et al.Active aeroelastic wing flight research program:technical program and model analytical development[J].Journal of Aircraft,2000,37(4):554-561. |
| Click to display the text | |
| [6] | Kudva J N.Overview of the DARPA smart wing project[J].Journal of Intelligent Material Systems and Structures,2004,15(4):261-267. |
| Click to display the text | |
| [7] | Yue T,Wang L X,Ai J Q.Gain self-scheduled H∞ control for morphing aircraft in the wing transition process based on an LPV model [J].Chinese Journal of Aeronautics,2013,26(4):909-917. |
| Click to display the text | |
| [8] | He Z,Lu Y P.Decentralized robust control design for spatially interconnected systems with uncertainties[J].International Journal of Innovative Computing,Information and Control,2010,6(4):1763-1771. |
| [9] | 董二宝.智能变形飞行器结构实现机制与若干关键技术研究[D].合肥:中国科学技术大学,2010.Dong E B.Research on realization mechanism and some key technologies of smart morphing aircraft structures[D].Hefei:University of Science and Technology of China,2010(in Chinese). |
| Cited By in Cnki (16) | |
| [10] | 陈钱,白鹏,李锋.飞行器变后掠过程非定常气动特性形成机理[J].力学学报,2013,45(3):307-313.Chen Q,Bai P,Li F.Study on the formatioin mechanisms of unsteady aerodynamic characteristics of morphing flight vehicle in sweep-varying process[J].Chinese Journal of Theoretical and Applied Mechanics,2013,45(3):307-313(in Chinese). |
| Cited By in Cnki | |
| [11] | Obradovic B,Subbarao K.Modeling of flight dynamics of morphing-wing aircraft[J].Journal of Aircraft,2011,48(2):391-402. |
| Click to display the text | |
| [12] | Seigler T M,Neal D A,Bae J S,et al.Modeling and flight control of large-scale morphing aircraft[J].Journal of Aircraft,2007,44(4):1077-1087. |
| Click to display the text | |
| [13] | Henry J J.A mathematical model for roll dynamics by use of a morphing-span wing[C]//48th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference.Reston:AIAA,2007:76-91. |
| [14] | 刘延柱.高等动力学[M].北京:高等教育出版社,2001.Liu Y Z.Advanced dynamics[M].Beijing:Advanced Education Press,2001(in Chinese). |
| [15] | Shiv J,Zeb T,William C,et al.Comparison of morphing wing stategies based upon aircraft performance impacts[C]//45th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics & Materials Conference.USA:AIAA,2004:1-7. |
| Click to display the text | |
| [16] | Bowman J,Sanders B,Weisshaar T.Evaluating the impact of morphing technologies on aircraft performance[C]//43rd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference.USA:AIAA,2002:1-114 |
| Click to display the text |
